Sin dudas, la actividad naviera se enfrenta a una de las más espectaculares transformaciones en los métodos con que funcionan los buques. No se ha visto nada igual desde que la construcción de naves dejó de ser con madera y se las comenzó a construir con metales, y desde que hace 237 años se comenzó a propulsarlas con vapor y se aplicaron distintos inventos para lograr la propulsión por medios mecánicos.
En las páginas siguientes el lector encontrará una síntesis (*) traducida a nuestro idioma de los muchos artículos aparecidos en la prensa extranjera especializada en temas marítimos.
")
Actualización a Julio 2021 del original emitido en Noviembre de 2017: Como toda síntesis, y además traducida, esta investigación es sólo un resumen de las diversas notas periodísticas sobre el tema. El autor ha intentado clasificar estas noticias en siete grandes grupos según se muestra en la página siguiente, para facilitar la búsqueda selectiva de temas.

INTRODUCCIÓN
Varias instituciones gubernamentales en el mundo están estudiando el tema de los buques sin tripulación. Estos proyectos de investigación y desarrollo se realizan con frecuencia en asociación con universidades y llevan ya varios años de iniciados.
Simultáneamente varias firmas comerciales que lideran la Investigación y Desarrollo de sistemas náuticos para uso mercante en buques no tripulados han hecho publicidad profusa de sus prototipos, algunos de los cuales ya están navegando, al principio con tripulación para verificar sistemas.
La velocidad de avance de la ciencia y las técnicas para operar naves a control remoto y autónomas es impresionante, y contrasta con los cinco milenios que se tardó en pasar de las embarcaciones de remo y vela, a las de propulsión mecánica. Estas últimas llevan, hasta el presente, apenas 230 años de existencia.
Además, este fenómeno de los buques sin tripulación no es un evento aislado, ni es una casualidad descubierta en algún laboratorio, sino que es parte del gran – y sobre todo veloz – avance de la ciencia hacia las máquinas inteligentes y hacia sistemas digitales para su control sin intervención humana.
Las naves sin tripulación controladas remotamente ya están en el agua navegando, y ya se está estudiando sobre cómo ello afectará a las normas y leyes existentes.
Como sucede con casi todos los adelantos de la ciencia, los buques autónomos y su operación sin tripulantes ocasionará una erosión en los ya escasos puestos de trabajo a bordo de las naves.
1 – 5000 años navegando a remo y vela – sólo 237 años desde la Introducción de la máquina de vapor hasta nuestros días
Hay evidencias arqueológicas obtenidas de excavaciones a orillas del Nilo que contienen grabados de embarcaciones propulsadas por velas, que datan del año 3500 AC.
Transcurrieron 5200 años durante los cuales solo se navegaba a remo o a vela, hasta que a finales del siglo XVIII de nuestra era, surgiera la idea de utilizar la máquina de vapor como medio de propulsión.
Entre los pioneros se encuentra el francés Claude Francois Jouffroy d’Abbans, cuyo “Pyroscaphe” navegó frente a Lyon, sobre el rio Saona, en Francia. El año era 1784.
{kind=link}

Maqueta del Modelo del Pyroscaphe, Muse de la Marine du Paláis de Chaillot de Paris
El norteamericano John Fitch, en 1787 armó y operó un buquecito de 18 metros de eslora propulsado a vapor que navegó durante un período breve entre Philadelphia y Trenton. Debido a que costaba más para operar que los fletes que generaba, fue abandonado.
El primer barco que se utilizó con fines prácticos fue el vapor de ruedas Charlotte Dundas, construido por el inglés William Symington en 1802 y financiado por Lord Dundas. La rueda de paletas estaba situada en la popa de la embarcación que era una barcaza para navegar en los canales. Dundas falleció y el prototipo quedó amarrado hasta pudrirse, no sin antes haber movido a dos barcazas de 70 toneladas una distancia de 20 millas contra viento.
Sin embargo, hasta la construcción en Estados Unidos del “Clermont” de la compañía de Robert Fulton (1807), no se creyó seriamente en la viabilidad de la navegación a vapor.

Fulton había observado ya en Europa los primeros experimentos con barcos a vapor.
El Clermont tenía cerca de 40 metros de eslora y llevaba las palas en la parte central del casco. A una velocidad de 7,5 kilómetros por hora, logró reducir a 32 horas una travesía para la que los barcos de vela necesitaban cuatro días.
Transcurrieron todavía muchos años hasta que aparecieron los grandes buques propulsados por hélices. Con ellos pasaron a la historia los vapores con ruedas de paletas que navegaban por los ríos y más tarde por los océanos.
Durante muchos años y hasta 1914 convivieron buques mercantes de vela con los de propulsión mecánica, mayoritariamente vapores.
Luego vinieron los motores Diesel, la utilización de energía atómica, gas natural, etc.
Lo que motorizó esta colosal conversión a la propulsión mecánica fue la búsqueda de la eficiencia, la baja de los costos, aumentar la previsibilidad de las fechas de partida y arribo de los buques, y por supuesto los desarrollos y adelantos con fines bélicos, cuyos resultados fueron luego tomados por los diseñadores de buques mercantes.

La línea del tiempo y los avances tecnológicos
2 – AVANCES TECNOLÓGICOS NO MARINOS
No se puede hablar de los buques autónomos en forma aislada, sino que este desarrollo es contemporáneo con algunos cambios en la actividad industrial, del transporte terrestre, de la vida cotidiana, de la medicina, y que a continuación sólo se los menciona para dejarlos como telón de fondo para los capítulos que siguen.
- Impresoras 3D que imprimen herramientas y manos artificiales, así como placas para armar casas.
- Camiones autónomos que circulan a lo largo de las hileras de brotes de caña de azúcar, evitando pisarlas y arruinarlas, permitiendo una eficiencia mejor que con un conductor humano.
- Maletas inteligentes con chip que permiten localizarlas en cualquier aeropuerto.
- Robótica para armado de vehículos en líneas de montaje, intercalando humanos y maquinas.
- Automóviles eléctricos Tesla producidos masivamente.
- iPhone ya tiene 14 años de vida.
- Niño enfermo confinado a su casa manda robot a clase que transmite online las clases.
- Inteligencia artificial, las maquinas están siendo enseñadas a razonar como humanos.
- Camiones autónomos sin chofer en zonas mineras y portuarias.
- Mejoras en los rindes de las cosechas de cereales por la ciencia de los datos, que permiten al agricultor aplicar fertilizantes y semillas en cantidades adecuadas a la composición del suelo dentro de cada lote explotado.
- Vigiladores “on line” que reemplazan a los guardias y porteros en los edificios.
- El combustible diésel y la nafta para los vehículos terrestres serán prohibidos en Francia a partir del año 2040, apuntando a los vehículos eléctricos o híbridos.
- Mercedes Benz ha introducido al mercado europeo camiones pesados para operaciones de construcción, minería y petrolera, dotados de su sistema Fleet Board, de monitoreo del vehículo y del conductor.
- La petrolera Shell hace cinco años que viene invirtiendo en tecnologías de bajo contenido de carbono. Esto incluye eólica, solar, nuevas opciones para vehículos eléctricos, e hidrógeno; así como una red interconectada de electricidad que proporcionará energía eléctrica a hogares y compañías.
- El diésel y la nafta con fecha de vencimiento en Francia y en Gran Bretaña: Ambos países apuntan a que sólo se vendan autos eléctricos e híbridos a partir del año 2040.
- El grupo tecnológico e industrial alemán Siemens ya ha hecho realidad parte de la primera autopista eléctrica para camiones híbridos. Desde 2019, Alemania puso en funcionamiento el proyecto “Elisa”, la primera red de camiones híbridos que son propulsados por un carril eléctrico para reducir las emisiones de dióxido de carbono.
- Tesla espera entregar 15 camiones semi eléctricos a Pepsi Cola en este año 2021 y continuar así con su desarrollo de estos camiones.
- Por primera vez se implanta una tráquea impresa en 3D a una paciente, que fue construida con material biodegradable.
- Autos sin chofer. Avances en los mapas digitales y los sensores.
- Facebook debió desactivar un experimento con Inteligencia Artificial en la que dos robots a los que se les había “enseñado” a hablar entre sí, comenzaron a intercambiar comunicación entre ellos que los humanos no podían comprender. Se pensó inicialmente en un error o falla, y se los desconectó. Pero investigaciones posteriores demostraron que no se trató de un error. Los robots descubrieron y comenzaron a comunicarse con un idioma mucho más sencillo que el de los humanos, pero no se podía comprender lo que se decían.
3 – AVANCES TECNOLÓGICOS MARINOS
3.1 – Buque autónomo NOMAD de la US Navy
El buque NOMAD de la US Navy ha completado su segundo viaje largo en aguas marítimas, esta vez desde la costa del Golfo de México hasta la costa Oeste, vía el Canal de Panamá. Completó así una travesía de 4.421 millas náuticas.
El tránsito por el canal lo hizo con tripulación maniobrando, pero el resto del viaje fue totalmente autónomo, controlado por los tripulantes para evitar inconvenientes.
El primer viaje autónomo de una embarcación de este tipo, la RANGER fue en 2020.
La Marina informó que este viaje les ha permitido un extendido período de prueba de la resistencia de la embarcación, interoperabilidad, control, comunicaciones, computadoras y los sistemas eléctricos.
La operación remota se llevó a cabo desde un puesto de control en tierra.
3.2 – PORTALES DE BUSQUEDA DE BUQUES EN LA WEB – SIN BROKERS
Portales de búsqueda de buques en la web por parte de grandes cargadores de volúmenes sólidos y líquidos a granel, sin la intervención de bróker. (Fuente Lloyds List)
Esta noticia se genera en uno de los gigantes mundiales de la minería, BHP Billiton.
Los extraordinarios volúmenes de carga a granel que se mueven en estos mercados son condiciones ideales para que periódicamente se den a conocer noticias que hacen temblar a todo el sistema.
Ya había sucedido con el otro gigante mundial, Vale do Rio Doce en Brasil, que para evitar quedar en manos de unos pocos armadores de super graneleros de 400.000 toneladas, decidió en 2008 la construcción de 12 buques de ese tamaño. El directorio reaccionó cuando el valor por tonelada de flete que se les exigía era igual al valor del mineral de hierro que ellos producían. El primer contrato por estos 12 buques fue el más grande jamás firmado, alcanzando los 1.600 millones de dólares. Para el año 2016 se habían entregado 35 de estos buques.
Un Valemax de 400.000 toneladas de Deadweight
En el caso de los australianos, el poder de compra (contratación de espacios de bodega) de BHP les ha empujado a lanzar en Enero de 2017 un Portal (plataforma digital) de oferta de sus cargas, en las que ha eliminado a los intermediarios (bróker de fletes) pues en forma “on line” asigna las cargas directa y digitalmente con los armadores.
Por el momento esto está restringido a partidas semanales de unas 170.000 toneladas en buques convencionales, pero definitivamente estamos ante un nuevo desarrollo.
Por otra parte, el artículo mencionado reproduce la opinión de algunos bróker que sostienen que si bien en el caso de grandes partidas de carga homogénea se puede operar digitalmente sin la intervención de un intermediario, si se tratara de cargas no estándar, de volúmenes menores y variados, será difícil prescindir del bróker.
3.3 – ROLLS ROYCE EN FINLANDIA
Rolls Royce abrió un centro de investigación y desarrollo para control remoto de buques en Finlandia. Comenzó a funcionar en 2017.
La firma Rolls Royce es una de las líderes en la investigación y el desarrollo de buques controlados remotamente y sin tripulación y su objetivo es tener una de estas unidades operando comercialmente para 2025, es decir, en apenas 4 años….
Ha anunciado la firma de un contrato con la Agencia Finlandesa de Financiación de Innovación, con base en Turku.
Ellos consideran que esta clase de buques representará un cambio fundamental en la actividad naviera durante la presente década y estos cambios están siendo empujados por la transformación digital del sector.
También a ser investigado y desarrollado será el tema de las estaciones terrestres para control de los buques autónomos.

Ilustración Rolls Royce
Algunos de los socios estratégicos de Rolls Royce serán, según el anuncio de la empresa, el Technical Research Cetre of Finland, la Universidad Tecnológica de Tampere y numerosos emprendimientos particulares que se especializan en tecnologías nuevas como Deltamarin, DNV GL, NAPA, y otras.
PARA 2025 tendrán un buque costero, controlado remotamente, sin tripulación.
PARA 2030 tendrán un buque oceánico, controlado remotamente, sin tripulación.
PARA 2035 tendrán un buque oceánico, sin tripulación, totalmente autónomo.
3.4 – YARA INTERNATIONAL – NORUEGA
Yara International de Noruega ya tiene en operación el primer buque autónomo de propulsión totalmente eléctrica para transporte de fertilizantes en el Báltico, con tecnología Kongsberg. (Fuente: Bloomberg, Junio 2017)
Yara International ASA es una empresa internacional noruega de la industria química, cuya principal actividad es la conversión de la energía, los minerales y el nitrógeno del aire en productos agrícolas y soluciones para la industria.
Su propósito en relación con el tema de buques autónomos es que apunta a poder entregar cargas por vía marítima en buques sin tripulación.
El Yara Birkeland fue entregado por el astillero VARD a sus propietarios en Diciembre de 2020, y está en la actualidad realizando pruebas con tripulación a bordo. El buque es propulsado eléctricamente, tiene cero emisiones de residuos de la combustión de hidrocarburos, y en sus contenedores transportará fertilizantes.
La firma estima que el nuevo buque, totalmente ecológico, reemplazará unos 40.000 viajes de camión por año en Noruega en cuanto esté operativo comercialmente.
Entre los desafíos que se presentan están las fuertes corrientes oceánicas, mal tiempo, y, en algunos lugares del mundo, la piratería.
Para Kongsberg esta construcción le permitirá estudiar el comportamiento de un buque totalmente propulsado por electricidad, con el consiguiente ahorro de emisiones de sulfuro y otros contaminantes provenientes de los combustibles que tradicionalmente se utilizan en los buques.
El proyecto cuenta con un aporte del gobierno de 16,3 millones de dólares.
3.5 – AUTORIDAD MARITIMA DANESA (DTU)
La Autoridad Marítima Danesa ha encargado a la Universidad Técnica de Dinamarca (DTU) que identifique los desarrollos técnicos de relevancia que deben ser estudiados para comprender la automación de buques.
El profesor Mogens Blanke lidera las iniciativas de la Universidad sobre autonomía. El está continuando con la investigación hecha por sus predecesores.
Este estudio pone de manifiesto el uso indiscriminado que el ciudadano común le asigna al término “autónomo” y se concentra en las definiciones y en los pasos que llevarán desde una operación del buque completamente manual hacia una operación totalmente automática. El estudio pone de manifiesto lo que los expertos ven como desafíos en la navegación autónoma.
Los buques mercantes están dotados con instrumentos electrónicos de navegación que informan sobre la posición de la nave, la distancia a otros buques, la predicción de la trayectoria, y todo ello se ubica sobre las cartas electrónicas. Estos instrumentos son el GPS, el AIS, el radar y el ARPA. Se requiere que en el puente de mando de un buque en navegación se encuentre de guardia una persona, y en algunos casos otra más para vigilar el tránsito de los otros buques.
Los buques son timoneados estableciendo una ruta electrónica sobre la carta, que es seguida por otro instrumento que es el piloto automático. El control manual de propulsión y timón sólo se hace para corregir errores y para maniobrar en aguas confinadas.
La terminología de este estudio es la siguiente:
Navegación manual de buques mercantes:
El oficial de navegación ordena (al marinero de puente) o ingresa (en el piloto automático) el rumbo y la velocidad. El control de la maquina propulsora se pasa al puente de mando. El oficial de navegación tiene una carta electrónica en la que constantemente se plotea (sitúa) el buque y su rumbo. El radar muestra las posiciones, rumbos y velocidades de los demás buques a la vista del radar.
Manteniendo una ruta electrónica
Sin la operación de un humano, el piloto automático conduce el buque navegando a un rumbo determinado, desde el punto A hasta el punto B
Soporte para decisiones
Este soporte consiste en la planificación de una ruta a ser navegada, de una velocidad a ser desarrollada para arribar a destino en una fecha y hora determinadas, tomando en cuenta las predicciones de las condiciones hidrometeorológicas para la ruta a navegar.
Un soporte más extenso consistiría en guiar al oficial de guardia sobre la reacción del buque en caso de tener que esquivar un peligro en aguas confinadas.
Navegación operada remotamente
Es la incorporación remota de waypoints en la ruta planificada, o mover alguno o todos esos waypoints y el ajuste de la maquinaria de propulsión.
Monitoreo remoto
Las magnitudes medidas por los sensores a bordo del buque, por ejemplo, de la sala de máquinas, del rumbo y la velocidad. Estos datos se muestran en tiempo real en un centro de operaciones situado en tierra o a bordo de otra nave.
Monitoreo Total
Incluye transmisión de imágenes por TV de los alrededores, de la pantalla del radar, de manera que el centro de operaciones en tierra tenga suficiente información sobre el buque y lo que lo rodea, para poder efectuar Navegación Operada Remotamente
Autonomía Parcial
El buque tiene sistemas para determinar la situación así como las consecuencias y le avisa al oficial de navegación sobre cómo debe reaccionar. El oficial de navegación no necesariamente está en el puente de mando.
Autonomía Total
La situación es detectada y analizada y se adopta una decisión sin la intervención de humanos.
Seguridad de la navegación
En la actualidad, y a pesar de todos los instrumentos y herramientas descriptos, se siguen produciendo colisiones y varaduras todos los años. La European Maritime Safety Agency identifica que en el período 2014 – 2019 han ocurrido 1801 incidentes en los cuales el error humano representa el 54 % de las causas.
Por otra parte, las estadísticas de accidentes fatales demuestran que el trabajo en la cubierta de los buques (por ejemplo, en maniobras de amarre) es de entre 5 a 16 veces más peligroso que el trabajo en tierra.
Quienes proponen la autonomía de los buques consideran que se lograría incrementar la seguridad en el mar en forma considerable mediante los buques automatizados y autónomos, sin poner en riesgo a los seres humanos.
La norma que se usa para evitar las colisiones en el mar es el Reglamento Internacional Para Prevenir los Abordajes (RIPPA) última versión de la IMO de 2017 y basada en la Convención de 1972.
En esencia, estas normas describen el reglamento de tránsito entre buques de distintas clases, los deberes de mantenerse apartados unos de otros, y las señales visuales y acústicas a ser emitidas por los buques para evitar las colisiones. Sin embargo, en determinadas circunstancias estas reglas pueden ser interpretadas erróneamente, lo cual ha provocado más de una colisión.
La esperanza generalizada es que la introducción de la navegación autónoma reducirá estos incidentes.
Sin embargo, será necesario primeramente determinar en forma correcta y confiable cuales son las provisiones del RIPPA para cada situación de peligro si se quiere lograr una mejora en la seguridad de la navegación con los buques navegados autónomamente.
Es un gran desafío poder desarrollar los algoritmos para cumplir con el RIPPA debido a que este es muy específico para cada situación. La necesidad de desarrollar estos algoritmos ha sido profundamente abordada por Munk en 1989, Lazarowska, 2017, Grinyak en 2016, Johansen y otros en 2016, Zhang & Furuscho en 2016, Naeem y otros en 2016, Li & Ma en 2016.
Por el momento, la solución a los algoritmos para el RIPPA está en etapa de investigación.
La validación de un sistema automático de interpretación del RIPPA es un desafío muy grande, especialmente cuando se trata de dar el Soporte para Decisiones para buques autónomos.
La navegación en aguas restringidas de buques de gran calado y tamaño son un desafío aparte, tanto para los oficiales de puente como para los algoritmos que puedan resolver las distintas situaciones.
Vigía.
Las reglas requieren un vigía en aguas costeras o cercanas a ellas. Las investigaciones del proyecto MUNIN (ver pág. 58) han demostrado que las tecnologías disponibles con las cámaras, y combinadas ellas con visión digital tanto en la gama visible como infrarroja proporcionan una apreciación más segura que el ojo humano.
El estudio considera que en el caso de buques parcialmente tripulados o sin tripulación, la combinación de diferentes sensores, incluyendo el radar y visión digital en varias longitudes de onda pueden con seguridad reemplazar al vigía humano. Se continúa experimentando en varios contextos con estos sistemas.
Buques autónomos
Hace 25 años que se experimenta con buques autónomos de tamaño reducido, tanto para uso civil como militar. La puesta en marcha de buques de gran tamaño para fines militares se conoce sólo parcialmente a través de noticias periodísticas, pues se trata de información clasificada.
Kongsberg realiza desde 2016 pruebas con un buque supply en Noruega y AAWA (Advanced Autonomous Waterborne Applications de Finlandia) las realiza con un ferry, para demostrar que la tecnología para control remoto de estas naves reales funciona en forma confiable en navegación y en maniobra.
Autonomía total
La autonomía total permitirá que los sistemas del buque interpreten por sí mismos las situaciones de riesgo de colisión en la proximidad del buque, y que ellos serán capaces de resolver con seguridad dichas situaciones.
El estudio menciona que muy probablemente la autonomía total para algunos buques de superficie no será la solución más apropiada ni la más económica, y que además seguramente existirá una etapa de transición gradual desde la actual hacia la totalmente autónoma.
No existe consenso sobre si la navegación con buques sin tripulación será la solución.
El estudio Danés hace referencia a las normas emitidas por Lloyds Register en 2016 (ver pág. 36)
Aviones no tripulados
El estudio danés hace referencia a que las aeronaves (aún las tripuladas) tienen sistemas denominados Traffic Collision Avoidance System (TCAS) que consiste en que cada avión le avisa electrónicamente a los demás cuál es su posición y la trayectoria proyectada. El sistema le avisa a cada avión que acción evasiva debe tomar. Esta tecnología está en uso desde hace mucho tiempo con los drones aéreos, y será de mucha utilidad entre los buques autónomos.
Impulso de la Comunidad Europea
La UE tiene por objetivo para el año 2030 que el 30 % del total del tráfico de cargas transportadas en distancias superiores a 300 Km deberán hacerse o bien por ferrocarril o bien por vía marítima. De allí que impulse la investigación y desarrollo de estos aspectos.
Las comunicaciones con los buques sin tripulación
El estudio de Dinamarca también remarca la importancia de los sistemas de comunicación en relación con el gobierno (manejo del timón) de los buques autónomos, especialmente en relación con los cyber ataques y hakeo. Dichos riesgos tienen que ser profundamente analizados al momento de diseñar los sistemas de comunicación.
El estudio también menciona los avances logrados por AAWA – Advanced Autonomous Waterborne Applications (ver pág. 62)
Tipos de buques a ser analizados con el propósito de su automación
El estudio se desvía marcadamente de los otros proyectos (Rolls Royce que se focaliza en buques graneleros de considerable tamaño en aguas del Océano Atlántico y Océano Pacífico) y subraya que para que Dinamarca tome una posición de liderazgo en buques autónomos es esencial que se focalice en identificar aquellos tipos de buques en los que la demanda futura de nuevo tonelaje y/o la adecuación de tonelaje existente sea rentable en términos no sólo de bajar costos sino de lograr los objetivos en el corto plazo.
El comentario es que los graneleros grandes ya funcionan con tripulaciones reducidas y que funcionan con motores convencionales y que no hay – en ese segmento – muchas posibilidades de lograr reducción de costos significativas.
En cambio identifica a los siguientes tipos de buques en los cuales focalizar el estudio, todos mucho más pequeños que graneleros de porte significativo y de ultramar:
- Ferries o transbordadores interisleños pequeños
- Remolcadores
- Barcazas
- Buques de apoyo para la exploración y explotación de hidrocarburos en el mar
- Buques autónomos para inspecciones sub aqua de instalaciones petroleras costa afuera
El estudio destaca que esta clase de buques son candidatos para operar autónomamente ya que permitirían combinar la propulsión eléctrica con autonomía, y una reducción importante de tripulaciones.

El ferry Tycho Brahe, puerto de Helsingor, Dinamarca
Los ferry son un vínculo muy importante de los habitantes de las islas con el resto de Dinamarca, y en la gran mayoría de los casos pertenecen al Estado, que constantemente trata de reducir los costos.
Existen 30 rutas con cruces que demoran entre 20 minutos y 3 horas. Sin embargo, la mayoría de los cruces demoran tan sólo entre 4 y 12 minutos.
La flota está cerca de la obsolescencia y deberá ser renovada en breve, haciendo por ello muy atractivo el tema de la propulsión eléctrica y la automación.
Competencia con los vehículos terrestres autónomos
El estudio menciona que para no quedar fuera de la competencia en bajar los costos, el tramo marítimo de la cadena de logística debe poder mantenerse a la par de los logros que está obteniendo el transporte terrestre con los camiones autónomos.
Listado de actividades tendientes a implementar viajes de buques autónomos
Esta lista contiene las actividades que se deberían implementar para lograr viajes de buques sin tripulación.
Algunas de ellas tienden a lograr el conocimiento y la experiencia necesaria para
efectuar la evaluación y aprobación de buques autónomos en el mar, otras contribuirán a generar conocimientos en Dinamarca que serán esenciales para la autonomía de buques en el mar, y otras son propuestas para demostraciones de autonomía en el mar.
El tema del vigía electrónico:
La tecnología existente en sensores hace posible un cambio drástico en la forma en que se lleva a cabo en la actualidad la tarea de vigía en el puente de mando de los buques.
El cambio de paradigma sobre el vigía humano abre a su vez la posibilidad de modificar drásticamente el diseño de los buques en cuanto a su estructura y alojamientos, por supuesto en cuanto a la reducción de costos y tiempo de su construcción.
Un buque con sensores para vigía electrónica no requeriría un puente de mando elevado, ya que la misma se efectuará sin la presencia física de una persona de guardia, sino por medio de un “data link” con la estación de control en tierra desde la cual se podrá monitorear y posiblemente efectuar el control remoto del buque.
Asimismo, la idea de un buque sin la presencia de un oficial de guardia en el puente parte de la base de la existencia a bordo de tecnología que permita interpretar la situación del buque y de todo lo que lo rodea, excepto en condiciones de tráfico complicadas para las cuales se requeriría que un oficial tome las decisiones para gobernar (timonear) el buque.
Seguridad con navegación autónoma
El estudio indica que el camino hacia buques no tripulados y navegación autónoma suplementado mediante automación avanzada requerirá de información totalmente confiable proveniente de los sensores, sobre lo que rodea al buque, para lograr la seguridad de la navegación.
La Autoridad Marítima Danesa tendrá que establecer los requerimientos para lograr la funcionalidad, confiabilidad y nivel de redundancia de los equipos y cómo se logrará la solución de fallas.
La investigación y desarrollo de sensores, y del reconocimiento y clasificación de elementos y objetos que rodean al buque, son esenciales para lograr un nivel aceptable de seguridad y confiabilidad para sistemas de navegación autónoma. El sistema debe ser capaz de funcionar aún si falla un sensor, y debe poder hacerlo en toda condición meteorológica.
Método
Se deben someter a pruebas en toda condición meteorológica los sensores que se destinarán a suplir la presencia del oficial de navegación en el puente ante las distintas condiciones de automación (ver 4.1 – LLOYDS REGISTER – pág. 36)
- Para soporte de decisiones y para llamar a los oficiales de navegación (AL 1 al 3)
- Para decisiones cuando se monitorea (AL 2 al 4)
- Para autonomía monitoreada (AL 5)
Monitoreo y validación de sistemas para navegación autónoma
El término en inglés Situational Awareness (conciencia de la situación) se refiere a la comprensión y estar alerta a lo que rodea al buque, y cuando se lo emplea en el ambiente de la navegación autónoma cobra importancia aún mayor pues se trata ni más ni menos que de lograr que un sistema electrónico tome las decisiones para evitar colisiones en el mar. (como lo haría la mente del oficial de navegación en el puente)
Hasta el presente los estudios se han enfocado en el Reglamento Internacional Para Prevenir Abordajes en el Mar (COLREG en inglés, RIPPA en español) y el tema presenta sus desafíos, pues se utilizan algoritmos que aprenden de sus propias situaciones detectadas y de otras similares en otras unidades para lograr el aprendizaje colectivo de las mejores prácticas de evitar colisiones.
Para que el público en general pueda sentirse cómodo y confiado en que los algoritmos de RIPPA podrán funcionar de manera previsible y confiable se deberá lograr:
- Que los algoritmos para RIPPA estén certificados para su correcto funcionamiento en caso de que sean provistos directo de fábrica.
- Que dichos algoritmos mantengan su funcionamiento normal y correcto con el paso del tiempo, es decir, que no hagan navegar contrario a las reglas del RIPPA o a sus excepciones aun cuando “aprendan” de sus propias situaciones o de otros algoritmos.
- Que se haga monitoreo de buques de prueba de navegación autónoma para determinar sus actitudes y reacciones, y que con esta información se levante una matriz de riesgo de colisión de buques manualmente y remotamente controlados.
El diseño de la mayoría de los algoritmos RIPPA se basan en estudiar las reacciones de los algoritmos cuando se perturban los inputs. Es decir, se usan situaciones obtenidas de radar y AIS junto con datos de la carta náutica para determinar los desvíos de una ruta planificada a los efectos de evitar una colisión.
El monitoreo de si los otros buques navegan correctamente en base a sus situaciones es fundamental para determinar lo más temprano posible si hay en las cercanías o en aproximación uno o más buques que no responden a esa normalidad, con el fin de tomar decisiones de cuál es la mejor forma de evitar situaciones de aproximación con riesgo de colisión. Esto será fundamental para lograr calidad en la navegación de buques autónomos.
Los buques con comportamiento anormal que sean detectados en forma temprana permitirán tomar decisiones desde tierra (control remoto) o desde el buque autónomo en caso de autonomía total para una navegación segura. El estudio analiza en detalle los ferry, los remolcadores, los buques de apoyo y los drones submarinos.
3.6 – EL GOBIERNO DE CHINA (ADMINISTRACIÓN DE SEGURIDAD MARITIMA) Y LA UNIVERSIDAD DE WUHAN.
El gobierno de China y la Universidad han finalizado el proyecto encargado en 2015, para identificar los usos potenciales de buques no tripulados en aguas chinas.
El proyecto se llama “Investigación y desarrollo de buques multifuncionales sin tripulación”. Ya existen cuatro patentes registradas de estos sistemas.
El proyecto fue establecido en 2012 por ambas entidades.
Se han investigado las aplicaciones de esta clase de buques para pesca de altura, monitoreo de condiciones meteorológicas, defensa de fronteras, militar, etc.
3.7 – DELFT UNIVERSITY OF TECHNOLOGY (TU DELFT) – HOLANDA
La Delft University of Technology, Holanda, también está investigando la utilización de buques autónomos no tripulados.
Para la universidad de Delft la mayor ventaja de los buques autónomos será que reducirá los costos de operación de buques de carga en alrededor del 40 %. Esto volvería a favorecer al transporte acuático para permitir bajar la utilización de camiones y rutas terrestres, con las consiguientes consecuencias en la reducción de la polución.
Sostiene que los costos pueden reducirse aún más al evitarse las demoras que normalmente se producen cuando los buques tienen que esperar para ingresar por los puentes, las esclusas, los muelles, ya que los buques autónomos estarán conectados y dialogando permanentemente conectados con las mencionadas instalaciones, para que los puentes estén abiertos, las esclusas esperando, y los muelles preparados a la llegada de los buques autónomos.
Consideran además que serán más seguros estos buques al no contar con la causa del 75 % de los accidentes marítimos y fluviales, que ellos identifican como el error humano.
Uno de los profesionales entrevistados considera que las reglamentaciones se
adaptarán para permitir el funcionamiento de buques sin tripulación a más tardar en 2030.
El tema del diseño también es un desafío importante, el mayor desde la transición de los buques de madera a los de metal. Se deberán rediseñar las salas de maquias que han sido concebidas para ser operadas, atendidas y supervisadas por humanos en contacto con los fierros. Ya no serán necesarios los camarotes, ni los botes salvavidas, y otros aspectos de las tripulaciones tales como comedores, camarotes, instalaciones sanitarias, cámaras frigoríficas, etc.
En 2018 un equipo de estudiantes de la Universidad presentó un prototipo en miniatura de un buque autónomo en Miami, en una competencia de barcos autónomos.

Buque autónomo en miniatura para pruebas en el agua, Delft University
3.8 – Re Volt de DNV – GL.
En 2014 ha brindado detalles de Re Volt, el buque de carga para cabotaje propulsado por baterías y totalmente automatizado, que no requerirá tripulación.
Det Norske Veritas – Germanischer Lloyd (DNV GL) es una de las más importantes Sociedades de Clasificación, que también está estudiando establecer reglas para la clasificación de los buques autónomos.
ReVolt es una visión para el futuro y no se construirá hasta que varias de las tecnologías involucradas hayan madurado.
En conjunto con la Norwegian University of Science and Technology (NTNU) en Trondheim están llevando a cabo pruebas con esta miniatura operativa (escala 1:20) de un buque autónomo.
El gobierno noruego ha establecido las aguas del fiordo de Trondheim como el lugar de prueba de buques autónomos. (ver pág. 29).
Se ha establecido el Norwegian Forum for Autonomous Ships (NFAS) que está integrado por entidades empresariales y el gobierno y sus agencias.
El gobierno quiere promover la disminución de las cargas transportadas por tierra y que pasen a ser transportadas por agua, en buques de bajos costos, en forma segura y ambientalmente limpios. La propulsión eléctrica mediante baterías será más económica que buques con propulsión convencional.
Una vez seguros de la eficiencia y confiabilidad de las tecnologías de los sensores, el análisis de datos y su envío por un ancho de banda adecuada, el modelo a escala se podría transformar en un porta contenedores con capacidad para 100 TEUs para dar servicio en una ruta fija.
DNV GL está estudiando los riesgos potenciales que surgen con la automación de los buques para establecer nuevos estándares de seguridad.
3.9 – Bastø Fosen VI – Primer ferry autónomo en Noruega
13 febrero 2020

(Foto: KONGSBERG)
El primer tránsito de un transbordador autónomo del mundo realizado durante el servicio normal tuvo lugar en Febrero de 2020 en una embarcación completamente cargada de pasajeros y vehículos, y demostró un control totalmente automático de muelle a muelle, anunció Kongsberg Maritime.
El cruce histórico en Oslo, un paso clave en la integración de la tecnología autónoma en las operaciones de envío diarias, fue posible gracias a la colaboración entre la compañía naviera Bastø Fosen, KONGSBERG y la Autoridad Marítima de Noruega (NMA).
El ferry Bastø Fosen VI ahora utilizará funciones de tránsito adaptativo desarrolladas a partir de los sistemas avanzados de Kongsberg Maritime para mejorar la operación diaria de su servicio Horten-Moss, mientras continúa operado por una tripulación completa.
Según Kongsberg, la tecnología ofrece una plataforma para optimizar el consumo de combustible y reducir las emisiones de gases de efecto invernadero (GEI), así como experimentar ahorros tangibles en los costos operativos.
El sistema digital totalmente integrado en el Bastø Fosen VI realiza automáticamente todas las funciones de atraque y cruce con un nivel de precisión alto y repetible, asegurando que se sigan las mejores prácticas hasta el más mínimo detalle en cada tránsito. El resultado es un cronometraje más exacto y una mejor satisfacción del cliente: durante las pruebas en diciembre de 2019, Bastø Fosen VI llegó constantemente dentro de los dos segundos del tiempo programado.
Øyvind Lund, CEO, Bastø Fosen, dijo: “Hoy, con solo presionar un botón, uno de nuestros buques abandonó el muelle en Horten, cruzó el fiordo de Oslo y atracó en Moss, todo de forma completamente automática. Esto le da a la tripulación más tiempo para concentrarse en monitorear la embarcación y garantizar la seguridad de los pasajeros, que para nosotros son las principales motivaciones para adoptar esta tecnología.
“La cooperación con KONGSBERG y la NMA ha sido crucial para el éxito de esta empresa, al igual que la consulta con nuestros capitanes y tripulación”, continuó. “Los hemos incluido en este proyecto desde el principio y estamos encantados con lo comprometidos que han estado en su entrega. Esto es una ayuda, no un reemplazo. Una mayor precisión permite una mejor logística: por ejemplo, ahora podemos preprogramar el tiempo permitido para el cruce y así reducir el consumo de energía. La digitalización y la automatización son el futuro, y estamos orgullosos de ser los principales motores ”.
Los organismos reguladores nacionales e internacionales aún se encuentran en las primeras etapas de desarrollo de la legislación para dar cabida a las operaciones marinas automáticas, pero a través de su trabajo con Bastø Fosen y KONGSBERG en el Bastø Fosen VI, la NMA ha mostrado al mundo un camino claro hacia adelante. “Noruega es un país pequeño, pero somos muy grandes dentro de la industria marítima”, dijo Svein David Medhaug, de la Autoridad Marítima de Noruega. “Eso nos da la capacidad de promover estos avances en una gran parte de la flota mercante del mundo, y estamos felices de ser parte de eso. La seguridad es la cuestión clave para nosotros, y estamos encantados de trabajar con partes interesadas como Bastø Fosen y KONGSBERG para garantizar que esta tecnología sea sostenible y segura ”.
El Bastø Fosen VI ahora entra en un período de prueba de seis meses durante el cual se espera que el sistema automático, llamado ‘tránsito adaptativo’, controle la embarcación para la mayoría de los servicios, pero el capitán seguirá a cargo y el puente estará totalmente dotado de personal. En la actualidad, el equipo instalado no es totalmente autónomo: si se detectan buques u objetos en un rumbo de colisión, sonará una alarma y el capitán tomará el control.
Hablando a bordo del Bastø Fosen VI, Gunnar Pedersen, EVP Integrated Solutions, Kongsberg Maritime, dijo: “Salir del muelle, cruzar y atracar nuevamente, todo con solo presionar un botón: esta es una primicia mundial. También es súper suave, como vimos hoy. Pero sin la colaboración entre un operador de ferry inclinado hacia adelante como Bastø Fosen, el apoyo de las autoridades marítimas noruegas y un proveedor de tecnología como KONGSBERG, nada de esto hubiera sido posible. Este es un gran día para todos los involucrados, este es el futuro “.
El diseño del Software para generar la conciencia de la situación (Situational Awareness) y la confiabilidad de los sistemas autónomos para buques está en desarrollo, y se llegará a una nueva profesión de Expertos en Buques o Shipping Autónomo.
Para DNV GL también tiene elevada importancia la confiabilidad de las maquinarias de a bordo, ya que en un buque sin tripulación no se pueden hacer reemplazos de piezas eléctricas, electrónicas ni mecánicas. De allí que se prefiere la propulsión eléctrica para evitar piezas movibles como en un motor Diesel.
Finalmente DNV GL considera que esta clase de buques no será apta para navegación oceánica de largas distancias ya que las baterías no duran tanto tiempo.
3.10 – ROBERT ALLAN – REMOLCADOR RAmora
Robert Allan, diseñador canadiense de remolcadores de puerto y mar, ha brindado detalles de su RAmora, un remolcador de puerto sin tripulación operado a control remoto.
Este remolcador está diseñado para ser operado en forma remota desde otro remolcador o embarcación, de manera de poder acercarse a incendios para combatirlos sin arriesgarse a la intoxicación de las tripulaciones, para situaciones de derrames de químicos tóxicos, y para operaciones normales de buques en puerto que también son peligrosas.

El diseño tendrá 55 toneladas de tiro a punto fijo (Bollard Pull) y las máquinas serán híbridas, es decir, utilizarán combustible convencional y electricidad. Podrá ser operado tanto desde a bordo como remotamente, y los sistemas de control han sido diseñados en sociedad con la compañía canadiense International Submarine Engineering.
La ausencia de camarotes, puente, espacios de comedor y cocina hacen de su superestructura una figura aerodinámica y atractiva, muy estable y más económica para operar.
El guinche de remolque instalado a proa y protegido de las inclemencias del tiempo ofrece buena maniobrabilidad, y el cabo de remolque pasará a través de un dispositivo que lo mantiene siempre cerca de la cubierta para evitar vuelta de campana cuando se atraviesa al remolcado.
Una grúa es la que “alcanzará” la punta del cabo de remolque al buque a ser remolcado, evitando las situaciones de peligro que usualmente se presentan con los remolcadores pasando cabos muy cerca de las proas bulbo de los buques. La ausencia de tripulantes eliminará la posibilidad de accidentes en estas maniobras.
Tendrá FIFI 1 es decir monitores capaces de bombear 1200 m3 por hora alimentados por bombas eléctricas para combatir incendios.
Estos anuncios no se han materializado en un prototipo aún.
3.11 – BOURBON – Buque HRONN
La firma francesa propietaria de una de las flotas más importantes de buques de apoyo a tareas para la industria petrolera costa afuera y para los parques eólicos implantados en el mar ha suscripto un convenio para el desarrollo de un buque del tipo “supply” totalmente automatizado y sin tripulación.

Una imagen del Hrönn
Este buque de apoyo para los parques eólicos en el Mar del Norte será construido en Noruega bajo un proyecto de Bourbon en Automated Ships Ltd. y Kongsberg.
Será el primer buque en el mundo dedicado a este segmento. Si bien se preveía que esté a flote en 2018, esto no parece haber sucedido aún.
Estará dedicado además a tareas científicas, hidrográficas y de ROV (robots submarinos) así como de lucha contra incendios en plataformas afectadas a la explotación de hidrocarburos, en combinación con embarcaciones estándar.
Kongsberg instalará los sistemas de posicionamiento dinámico, de navegación, referencia satelital y de posicionamiento, y su enlace con una estación de control instalada en tierra de manera de poder operarlo en forma totalmente remota.
Este proyecto no ha dado frutos en la forma de un prototipo aún.
3.12 – NIPPON YUSEN, NAVIERA JAPONESA,
Ha comenzado a estudiar planes para operar un buque porta-contenedores grande en el Océano Pacífico a partir de 2019
La firma japonesa operadora de buques porta contenedores ha anunciado que probará buques de este tipo controlados remotamente a través del Océano Pacífico.
Están avanzados con su investigación y desarrollo en áreas de operación de naves, ahorros energéticos y logística de manera de poder bajar los costos de las naves, al hacerlas navegar sin tripulación.
Durante las pruebas se llevará una tripulación preparada para tomar las riendas en caso de necesitarlo.
La firma también anunció a fines de 2016 que ha acordado con el fabricante de radares Furuno Electric Co. Y Japan Radio Co. Y Tokio Keiki Inc. para el estudio de cómo evitar las colisiones entre buques autónomos.
Las firmas Mitsui O.S.K. Lines Ltd. y Kawasaki Kisen Kaisha Ltd. también de Japón están estudiando la tecnología de buques autónomos pero no han comunicado aún una fecha concreta de comienzo de pruebas.
(Bloomberg).
3.13 – NORUEGA – PRIMER ESPACIO MARITIMO RESERVADO PARA PRUEBAS DE NAVEGACIÓN DE BUQUES AUTÓNOMOS.
Una extensa área del Fiordo de Trondheim ha sido reservada para llevar a cabo las pruebas de navegación de buques autónomos, con la aprobación de la NCA (Norwegian Coastal Authority).
Kongsberg está involucrada en este proyecto, pues se necesitan espacios marítimos abiertos para probar sensores, software, y sistemas que harán posible la operación de buques autónomos.
El área reservada en el fiordo es de bajo tránsito y la ciudad de Trondheim es sede de varias organizaciones líderes y pioneras en tecnología y en investigación y desarrollo, tales como Kongsberg, Ocean Space Centre, Norwegian University of Science andTechnology (NTNU), Center for Autonomous Operations and Services (AMOS), y el Norwegian Marine Technology Research Institute (MARINTEK)
El artículo menciona el proyecto AUTOSEA, liderado por el Institute of Engineering Cybernetics de la NTNU que trabaja en la Conciencia de la Situación (Situational Awareness) y que también utilizará el área reservada en el fiordo para sus pruebas de sensores para evitar colisiones a partir del momento en que los buques sean totalmente autónomos. Además del radar tradicional están estudiando el uso de sensores, cámaras, detectores infrarojos, LIDAR, etc.
3.14 – FINLANDIA – ESPACIO MARÍTIMO RESERVADO PARA PRUEBAS DE NAVEGACIÓN DE BUQUES AUTÓNOMOS
Finlandia también tiene su propia zona reservada para las pruebas de buques sin tripulación. El área se denomina Jaaconmeri Test Area, y el proyecto es gerenciado por DIMECC, una compañía que participa de One Sea – Autonomous Maritime Ecosystem. Ha sido establecida por permiso del Ministerio Finlandés de Transporte y Comunicaciones.
La zona de pruebas se encuentra sobre la costa Oeste de Finlandia, frente al municipio de Eurajoki. Mide 17,8 Km de largo por 7,1 Km de ancho. Tendrá excelentes condiciones de conectividad, y es además una zona de aguas abiertas, y que se hielan en invierno, pudiendo por lo tanto hacer las pruebas de los buques en condiciones de hielo reales.
3.15 – FALCO, Primer ferry finlandés probado en navegación autónoma – Dic. 2018
Finferries es una empresa estatal finlandesa operadora de transbordadores, que en cooperación con Rolls Royce ha demostrado el funcionamiento perfecto de este ferry.
El FALCO utiliza una combinación de tecnologías inteligentes para buques de Rolls Royce, para navegar con todo éxito en forma autónoma en el viaje entre los puertos de Parainen y Nauvo. El viaje de regreso se efectuó en forma controlada remotamente desde tierra.
El buque tenía a bordo a 80 invitados VIP, y durante la demostración detectó objetos utilizando los sensores y la inteligencia artificial y adoptó maniobras para evitar colisiones, así como un amarre totalmente autónomo, sin la intervención de la tripulación.
Los sensores son avanzados, que permiten armar un panorama de lo que rodea al buque en tiempo real, y con un nivel de eficacia muy superior al ojo humano. Estos sensores transmiten al centro de control en la ciudad de Turku, situada a 50 Km del lugar, desde donde un capitán monitorea las operaciones autónomas y puede intervenir para controlar manualmente la embarcación en caso de ser necesario.
El FALCO tiene una eslora de 53,8 metros, con entradas para vehículos en proa y popa, que entró en servicio para Finferries en 1993, equipado con propulsores azimutales Rolls Royce.
3.16 DINAMARCA – PRIMER ENSAYO CON UN REMOLCADOR REAL OPERANDO REMOTAMENTE NAVEGANDO EN EL INTERIOR DEL PUERTO DE COPENHAGUEN.
Rolls Royce y Svitzer, la compañía de remolcadores del grupo Maersk, llevaron a cabo una prueba en el puerto de Copenhagen con un remolcador de tamaño real operado remotamente.
Se trató del Svitzer Hermod de 28 metros de eslora, dotado con dos motores MTU M63 con una potencia de 2000 Kw cada uno. El remolcador ya estaba equipado con DP (Posicionamiento Dinamico) lo cual hizo más simple la combinación con el control remoto para operarlo. Cuenta también con sensores que combinan distintos datos usando software avanzado para permitir que un capitán, operando desde el puesto de comando (ROC que es la sigla de Remote Operating Centre) , pudiese hacer que el Svitzer Hermod cumpliera con una navegación adentro del puerto.
El puesto de comando está situado en las oficinas de tierra de Svitzer. Este puesto de comando no sigue exactamente el layout de una timonera habitual de remolcador de puerto, sino que – con el aporte de capitanes experimentados de la compañía – se distribuyeron las pantallas y los aparatos para control remoto en forma adecuada para el capitán operador remoto.
Durante la demostración el Svitzer Hermod estuvo tripulado por una dotación completa en caso de que alguno de los sistemas fallara.

Fuente Tug and Osv
3.17 – HELICE DE BUQUE CONSTRUIDA MEDIANTE IMPRESORA 3 D (Tugandosv.com)
La primera hélice impresa en 3D está por ser fabricada, y contará con la clasificación de Bureau Veritas.
Se trata de un proyecto en el que participan Damen, el principal astillero de construcción de remolcadores de Holanda, como así también la Autoridad Portuaria de Rotterdam, Promarin que es quien la ha diseñado, y Autodesk, la compañía de software y Bureau Veritas.
La aleación de bronce y el sistema WAAM (Wire Arc Additive Manufacturing ) permitirán pronto la producción de la primera hélice que tendrá un diámetro de 1,30 metros y pesará 180 Kg. por lo cual el prototipo se llamará WAAMpeller.
Directivos de la empresa Promarin y de Damen mostraron un modelo en miniatura durante la ultima Exposición TUGNOLOGY en Rotterdam durante el año 2017.
Piensan los directivos del proyecto que la impresión 3D bajará sustancialmente los costos de fabricación, y esta hélice de metal será la primera en obtener la certificación de la Clase.
Comenta el autor que Damen se enteró de la alternativa de impresión 3D el año anterior, cuando uno de sus cursos para estudiantes incorporó a tres estudiantes de la DTU (Delft Technical University, (Ver pag 21) y así tomó contacto con los demás integrantes del proyecto.
3.18 – BUQUES MILITARES AUTÓNOMOS – ROLLS-ROYCE
Rolls-Royce
La firma ha anunciado que está desarrollando un buque para las marinas de guerra de características autónomas. Tendrá una autonomía de 3500 millas, y se ha diseñado para misiones como patrullaje, detección de minas, control de flotas, etc.
Será propulsado totalmente en forma eléctrica, pudiendo operar por 100 días, tendrá un desplazamiento de 700 toneladas y alcanzará velocidades de 25 nudos.
La firma ha informado que para reducir costos y consumo se los proveerá de paneles solares capaces de entregar 3000 kwh para abastecer las navegaciones a baja velocidad durante – por ejemplo – operaciones de stand by.
La plataforma operacional de estas naves será más compleja que las de los buques mercantes, pues se requerirá que si detectan por ejemplo un submarino, puedan navegar en forma totalmente silenciosa, cambiando su misión a seguimiento y monitoreo. Gcaptain
3.19 – RUTAS A SER ESTUDIADAS EN TRONDHEIM PARA SER SERVIDAS POR BUQUES AUTÓNOMOS.
ASTAT es un ente noruego que estudia las aplicaciones para buques autónomos.
Los problemas que enfrenta la flota de buques tradicionales son de envejecimiento, de competencia atroz con el transporte terrestre por camión en Noruega, y de dificultades para mejorar los rendimientos de los buques.
La aparición del concepto de buque autónomo podría mejorar esta situación económica.
En particular están estudiando tres rutas, todas cortas, de unas 80 a 90 km que pueden ser abastecidas con buques autónomos que navegan durante 8 horas a 6 nudos.
El proyecto ASTAT fue lanzado en Mayo de 2017 y contempla el análisis de un buque pequeño, propulsado totalmente en forma eléctrica, para el transporte en tres rutas:
- Carga general y contenedores entre Josnoya y Trondheim
- Madera entre Orkanger y Follafoss o Skogn
- Pedregullo entre Vorrabotn y Trondheim
Las rutas están en aguas protegidas, sin ola y sin grandes corrientes, y pueden ser operadas con buques autónomos. El proyecto tenía que presentar un estudio de los sistemas de tráfico, qué buque utilizar, y la infraestructura necesaria para una eficiente operación comercial sin riesgos, y con ecuación costo – beneficio adecuada.
Tendrán que desarrollar métodos de estudio y de evaluación de sistemas de transporte con buques autónomos.
4 – IMPACTO EN LAS NORMAS Y EN LAS LEYES.
Es indudable que habrá un período de tiempo en el que estarán navegando simultáneamente buques con tripulación a bordo, y otros sin humanos embarcados.
Esa situación ya se ha vivido durante la larga transición de la propulsión a vela con los vapores:
Durante la segunda Conferencia Internacional para la Seguridad de la Vida Humana en el Mar de 1929, celebrada en Londres, se estableció en la Regla 25 que los buques de vela que navegaran utilizando simultáneamente sus máquinas debían llevar una señal diurna “para avisar de esta situación que era singular y que no merecían el favor con que se trataba a los buques de vela” en las reglas hasta ese momento (la Primera Conferencia fue celebrada en 1913 pero no entró en vigor debido al estallido de la 1ra. Guerra Mundial)
Todos estos cambios tecnológicos con la llegada de los buques sin tripulación parecen irreversibles, y exigirán discutir nuevas regulaciones.
4.1 – LLOYDS REGISTER, nuevas reglas
Lloyds Register anunció la emisión del Unmanned Marine Systems Code, para establecer las pautas regulatorias que esa Sociedad de Clasificación establecerá para el diseño, construcción y mantenimiento de Sistemas Marinos Autónomoes, es decir sin la participación de tripulantes.
Loyds ha emitido este código en Febrero de 2017. Contiene los procedimientos para el diseño de buques sin tripulación.
Contempla las áreas de Definiciones, Estructura, Estabilidad, Sistemas de Control, Sistemas Eléctricos, Sistemas de Navegación, Propulsión y Maniobra, Incendio, y Sistemas Auxiliares.
Se definen seis niveles de Autonomía (Autonomy Levels o AL)
AL 0: Gobierno manual: El timón y sus controles, o los puntos a navegar en la ruta son operados manualmente. El operador está a bordo o lo maneja a distancia vía enlace radial.
AL 1: Soporte para decisiones a bordo: El timón y la ruta a navegar se manejan automáticamente en base a los parámetros y las referencias del programa. La velocidad y el rumbo son medidos por sensores a bordo. El operador inserta la ruta en forma de waypoints y también la velocidad a navegar. El operador monitorea y puede cambiar rumbo y velocidad si fuera necesario.
AL 2: Soporte para decisiones a bordo o en tierra: Es posible timonear para cumplir una ruta predeterminada. Un sistema externo es capaz de introducir una nueva ruta. El operador monitorea la operación y los alrededores, puede cambiar rumbo y velocidad si fuera necesario. Pueden intervenir algoritmos para intervenciones.
AL 3: Ejecución con operador humano que monitorea y aprueba: Las decisiones son propuestas por el sistema basados en la información que brindan los sensores del buque y sus alrededores. El operador monitorea el funcionamiento del sistema y aprueba las acciones a tomar antes de que se ejecuten.
AL 4: Ejecución con operador humano que monitorea y puede intervenir: Las decisiones sobre acciones operativas y de navegación son calculadas por el sistema que ejecuta lo que ha sido aprobado por el operador. El operador puede estar en tierra. Monitorea el funcionamiento del sistema y puede intervenir si fuera necesario.
AL 5: Autonomía monitoreada : El sistema calcula y decide todo lo relativo a la navegación y operación. Las consecuencias y riesgos son resueltos de acuerdo a cada situación. Los sensores detectan los elementos relevantes en los alrededores y el sistema interpreta la situación. El sistema calcula sus propias acciones y las lleva a cabo.
El operador es contactado en caso de duda sobre la interpretación de la situación. El operador que puede estar en tierra ha establecido los objetivos y parámetros, y no es contactado salvo que el sistema no pueda resolver.
AL 6: Autonomía total: Todas las decisiones sobre navegación y operación son tomadas por el sistema. Este analiza las consecuencias y los riesgos. El sistema resuelve en base a los cambios de situación detectados por los sensores. Los conocimientos sobre los alrededores y sobre eventos previos y típicos son introducidos a nivel de “Inteligencia del sistema”. El operador solo interviene si el sistema no puede estar seguro de la solución. Los objetivos y parámetros pueden haber sido introducidos por el sistema. El operador esta en tierra.
Lloyds también ha determinado que para que esta condición de buque sin tripulación pueda operar sin inconvenientes será necesario que el motor principal, los motores auxiliares que generan electricidad, los separadores, bombas, sistemas de enfriamiento que de por sí son complejos y demandantes de mantenimiento funcionen correctamente. De hecho, la mayor parte de la tripulación de un buque convencional moderno está compuesta por personal de máquinas.
En el caso de los buques sin tripulación todos los sistemas de la máquina deben ser confiables.
Se establece que se deberán cuidar el ajuste a normas de la Clase, normas Nacionales, Normas Internacionales y Estándares Internacionales. Si ellos no existieran, se deberá hacer un análisis de Riesgos.
Lloyds ha establecido distintos niveles de tolerancia de fallas y redundancia:
FT 5: Permite operar con falla: Ninguna falla por sí misma impide la navegación, el monitoreo seguro y la propulsión normal. Todas las funciones principales son doble o triplemente redundantes. Todas las demás funciones toleran falla simple, y toleran falla doble. El diagnóstico y la administración de las fallas es autónoma.
FT 5: Tolera fallas: El sistema puede tolerar todas las fallas simples sin la intervención del operador, pero será con una prestación reducida. Todas las funciones principales son redundantes. El sistema puede diagnosticar y administrar sus fallas simples.
FT 3: Tolera fallas: Es necesario que el operador asista en la administración de las fallas. Puede seguir funcionando aunque con una prestación reducida.
FT4 y FT5: Son niveles decrecientes de posibilidades de continuar operando.
4.2 – DTU – REGLAS Y CONDICIONES LEGALES DE NAVEGACIÓN CON BUQUES AUTÓNOMOS.
Para la Universidad Tecnológica de Dinamarca (DTU) el desafío consiste no tanto en los aspectos técnicos, pues los ingenieros y quienes desarrollan estos sistemas para evitar colisiones entre buques autónomos están seguros de que entre ellos disminuirá drásticamente la cantidad de accidentes tales como colisiones y varaduras, debido a la inexistencia de personal embarcado a bordo.
El desafío se presentará cuando – durante un largo período – la coexistencia de buques tripulados y autónomos demuestre que se comportan de distinta manera frente a situaciones de peligro de colisión. Los buques autónomos deberán contar con sistemas y rutinas que permitan compensar esas diferencias.
Las estadísticas que maneja DTU muestran que el 65 % de los siniestros marinos tienen como causa “error humano”. Ese elevado porcentaje es la mayor apuesta a que los buques autónomos significarán un incremento notorio de la seguridad de la navegación.
Y para abordar el tema más clásico de la distribución de responsabilidades entre capitanes y operadores de buques autónomos, el estudio menciona que las reglas internacionales emitidas durante los últimos 200 años han considerado siempre que habrá un Capitán y su tripulación a bordo de todo buque que navega. Con la entrada en escena de buques sin tripulación, nos encontramos frente a un escenario (nada nuevo por cierto) de reglas que atrasan respecto de los avances tecnológicos.
Una de las alternativas positivas es que debido a que los primeros casos de buques autónomos navegarán en aguas internas de los países, y ellos pueden dictar normas de alcance nacional, no sería necesario esperar a que la OMI emita reglas de alcance internacional. (ver capítulo siguiente)
El estudio de DTU apunta que la tendencia por parte de la OMI en los últimos tiempos ha sido la de evitar redactar reglas detalladas y específicas para cada solución, y dejar lugar a que se construyan soluciones sin precedentes.
4.3 – LA OMI HA COMENZADO EL ESTUDIO DE LAS REGULACIONES INTERNACIONALES QUE SERÁ NECESARIO INTRODUCIR PARA LA OPERACIÓN DE BUQUES SIN TRIPULACIÓN.
A pedido de Dinamarca, Estonia, Finlandia, Japón, Holanda, Noruega, Corea del Sur, Reino Unido y los Estados Unidos de Norteamérica, la OMI ha comenzado a trabajar con el estudio de los cambios a las normas que será necesario introducir para este tipo de buques.
En este sentido, para el período 2018 – 2023 ha emitido una directiva estratégica dirigida a “integrar nuevas y avanzadas tecnologías en el marco regulatorio”. Esto involucra un balance entre los beneficios derivados de los avances tecnológicos, con las cuestiones de seguridad, el impacto ambiental, en la facilitación del intercambio internacional, los costos potenciales para la industria y su impacto en el personal embarcado y terrestre.
El Comité de Seguridad de OMI (MSC) emitió la directiva MSC 1 – Circ 1604 conteniendo las guías provisorias para las pruebas de los buques de superficie autónomos, en Junio de 2019.
El ejercicio de estudio de estos aspectos finalizó en Mayo de 2021
4.4 EL IALA TAMBIÉN DEBE MODIFICARSE.
El IALA (International Association of Lighthouse Authorities) también está estudiando la solución a problemas que se presentarán con la navegación de buques sin tripulación.
Está claro que las balizas, boyas y demás ayudas a la navegación deberán ser del tipo “activo” y no meramente pasivos.
4.5 – GRUPO DE TRABAJO DEL CMI (Comité Maritime International) – Opinión sobre el marco regulatorio de buques sin tripulación
Lo que sigue es un resumen de los aspectos que a juicio del autor son los más significativos. El documento describe la clasificación entre buques que operan sobre las aguas sin tripulantes a bordo:
- Buques controlados remotamente
- Buques controlados autónomamente.
En el primer caso se trata de un buque controlado desde una estación ubicada fuera del buque, y el control se realiza en forma remota.
En el segundo el buque es de alguna manera preprogramado para realizar una travesía determinada sin ninguna intervención humana, para lo cual cuenta con sistemas para evitar colisiones.
Menciona que, si bien en la actualidad los buques sin tripulación son de un uso muy restringido, y los mismos son de tamaños muy modestos, esto cambiará pronto.
Menciona que el desarrollo exponencial de la tecnología que permitirá la navegación de estos nuevos buques sin tripulación hace tanto más urgente la necesidad de contar con las normas que regulen dicha actividad.
En términos generales, el marco regulatorio de la navegación se compone de una multitud de normas legales, internacionales y nacionales, que cubren temas tales como la seguridad, protección del medio, contratos de transporte de cosas y personas, responsabilidad por daños y por pérdidas, salvamentos marinos, seguros, etc.
Todas ellas contienen los roles del capitán y la tripulación a bordo, cuya ausencia – en el caso de los buques sin tripulación – modificará una gran cantidad de normas.
El estudio del CMI se focaliza en tres aspectos:
- Normas jurisdiccionales – que detallan los derechos y obligaciones de los Estados para regular la actividad de los buques (CONVEMAR de 1982)
- Normas técnicas – que cubren la seguridad, certificación y entrenamiento de las tripulaciones (OMI – STCW)
- Normas del derecho privado que se refieren a la responsabilidad civil por polución, pérdidas por colisiones o relativos a la carga, y de cómo los reclamos pueden o deben ser direccionados.
CONVEMAR
El documento del CMI describe a la CONVEMAR como la ley más estable y firme de todos los tiempos, ya que ha sido aceptada formalmente por 169 países contratantes, y se aplica también para países que no son parte.
Establece que la primera cuestión a definir es si los buques carentes de tripulación son buques o no, en los términos de la CONVEMAR.
El Art. 91 determina que cada estado establecerá los requisitos necesarios para conceder su nacionalidad a los buques, para su inscripción en un registro en su territorio y para que tenga derecho a enarbolar su pabellón.
El documento parte de la base que la naturaleza de las actividades a ser desarrolladas por grandes buques, auto propulsados, que transportan carga, que están operados comercialmente aunque no tengan tripulación deberán ser considerados como buques en razón de su tamaño, aptitudes y funciones.
Las convenciones internacionales que rigen la actividad no hacen referencia a tripulación o falta de ella, y las normas nacionales normalmente tampoco diferencian los buques por si tienen o carecen de tripulación.
También menciona que no parecería tener justificación que dos buques, uno con tripulación y el otro sin ella, haciendo los mismos tráficos y corriendo los mismos riesgos, no estuvieran sujetos a las mismas reglas que han sido definidas para enfrentar dichos peligros.
Establece el CMI en este documento que debido a que estos buques sin tripulación son buques en los términos de la CONVEMAR, estarán sujetos a las mismas reglas que los buques con tripulación, y gozarán de los mismos derechos de paso que los buques tripulados, y que no será posible denegar su paso por las aguas jurisdiccionales por el mero hecho de no tener tripulación embarcada.
La CONVEMAR delega en los estados de abanderamiento el dictado de las normas de detalle para que los buques puedan tener derecho a enarbolar las banderas de cada país. Las reglas de cada país son el pilar fundamental sobre el cual se encuentra armado el esquema legal.
Un claro ejemplo de esto es el contenido del Art. 94 (2) (b) referido a las normas de cada país para regular lo concerniente a capitanes, oficiales y tripulación, o el Art. 94 (3) (b) referido a la dotación de los buques, las condiciones de trabajo y la capacitación de los tripulaciones teniendo en cuenta los instrumentos internacionales aplicables.
En el Art. 94 (5) la CONVEMAR determina que los estados deberán actuar de conformidad con los reglamentos, procedimientos y prácticas internacionales generalmente aceptadas, y hará lo necesario para asegurar su observancia.
El documento del CMI concluye en que la CONVEMAR evita por lo general, formular obligaciones más precisas para los Estados, refiriéndose a un conjunto abstracto y de continua modificación de normas internacionales que se generarán fuera de la CONVEMAR. De esta manera se evita “congelar” a nivel de la CONVEMAR los requisitos para un momento determinado o para un nivel técnico determinado, y al mismo tiempo preservando el carácter internacional de dichas normas.
El detalle de las obligaciones de los estados miembros es dejado a la OMI.
Jurisdicción del Estado de abanderamiento
La jurisdicción del Estado de abanderamiento se aplica a los buques independientemente de la zona en la que navegan, pero existe una jurisdicción paralela sobre el mismo buque dependiendo de la zona marítima en la que se encuentra navegando.
En efecto, la influencia de la jurisdicción del país costero sobre un buque extranjero se incrementa cuanto más cerca de la costa de ese Estado se encuentre navegando el buque.
Un buque que se encuentra voluntariamente dentro de las aguas internas de un estado está completamente sujeto a la jurisdicción de dicho estado. Los estados tienen amplias facultades para establecer las condiciones bajo las cuales se aceptará el ingreso a dichas aguas de buques extranjeros.
Esto quiere decir que un estado puede negar el acceso a sus aguas interiores de buques sin tripulación, siempre que dicha prohibición cumpla con criterios generales de razonabilidad que existan en las normas internacionales, tales como que no sean discriminatorias, que exista una proporcionalidad entre el objetivo de la norma y su aplicación, y que la prohibición no constituya un abuso de derecho (Art. 300 de la CONVEMAR)
Sostiene el CMI que esta norma puede llegar a constituir una limitación significativa en la libertad de movimiento y navegación de buques sin tripulación. Menciona también que esta potencial limitación no es exclusiva de los buques no tripulados.
También se menciona que el Paso Inocente de buques sin tripulación por el mar territorial (hasta las 12 millas de la costa) no podría ser impedido por el solo hecho de carecer de tripulación, ya que las causas para denegar el Paso Inocente se centran más en la actividad de los buques, que en si tienen o no tripulación.
El Art. 21 (2) de la CONVEMAR impide a un estado ribereño el dictado de normas que
se apliquen al diseño, construcción, dotación o equipos de buques extranjeros, a menos que pongan en efecto reglas o normas internacionales generalmente aceptadas.
El documento del CMI analiza también el caso de los tránsitos por los Estrechos utilizados para navegación internacional, en cuyo caso la jurisdicción de los estados ribereños se reduce aún más que para el Mar Territorial y el paso inocente.
Para el caso de los buques sin tripulación, las normas que se aplican para la Zona Económica Exclusiva (hasta las 200 millas) son aún más amplias y no existen limitaciones para la navegación de esos buques, como tampoco las hay en Alta Mar.
Otras normas relevantes para los buques sin tripulación contenidas en la CONVEMAR
El CMI menciona que aparte de los temas de jurisdicción de los Estados Ribereños, la obligación establecida por el Art. 94 (4) (b) de que cada buque esté a cargo de un capitán y de oficiales debidamente calificados posiblemente requiera de una clarificación para que los buques sin tripulación puedan navegar.
Si bien – dice el CMI – se podría argumentar que un buque operado remotamente desde tierra está al mando de un responsable, es menos obvio cómo se logrará que un buque totalmente automatizado cumpla con esta regla (Art. 94 (5).
La otra regla de la CONVEMAR que presume que habrá una tripulación a bordo de todo buque es la del Art. 98 (1) que establece la obligación del capitán de prestar asistencia a personas en peligro de desaparecer en el mar. No queda claro de que forma un buque no tripulado podrá, sin una tripulación a bordo, prestar esa ayuda.
NORMAS TECNICAS
El documento del CMI menciona que existen más de 50 reglas y convenciones internacionales en vigencia en la actualidad.
La mayoría de estas normas son impuestas por la OMI a los estados de abanderamiento, quienes a su vez deben emitir las leyes y reglamentos nacionales para ser aplicados a sus buques.
Frecuentemente estos estados delegan en sus órganos administrativos la emisión de las normas, e incluso con frecuencia intervienen las Sociedades de Clasificación.
De lo que antecede se desprende que el futuro de los buques sin tripulación y su navegación dependerán de la evolución de estas normas y de las negociaciones y acuerdos a los que se arribe para permitirles operar.
El CMI identifica tres normas con contenidos que pueden poner en jaque la operación e buques sin tripulación:
- SOLAS
- REGLAMENTO PARA PREVENIR LAS COLISIONES EN EL MAR
- STCW
SOLAS (Convención Internacional para la seguridad de la vida humana en el mar)
La Convención establece las condiciones mínimas de los estándares de construcción, equipamiento y la operación de buques para preservar la vida humana en el mar.
La Convención tiene un Anexo que consta de varios capítulos:
Capitulo
I – Disposiciones generales y definiciones.
El convenio no distingue entre buques con o sin tripulación, por lo cual no parecería haber impedimento. Los buques alcanzados por este convenio son los mayores de 500 toneladas de registro.
El convenio establece que las disposiciones de este capítulo pueden ser obviadas para buques de características noveles. Se podría argumentar que los buques autónomos son noveles para los alcances de esta dispensa. El documento del CMI menciona que mucho dependerá del enfoque de las administraciones de cada Estado.
II – 1 Construcción -Compartimentado y estabilidad, Maquinas e instalaciones eléctricas
El convenio establece que el capitán deberá contar con información accesible para evaluar las condiciones de estabilidad del buque. Será necesario que los controladores a distancia de los buques operados en forma remota cuenten con esta información.
El convenio establece que ante la indicación de una anomalía (alarma) los buques automatizados deben poder ponerse bajo la maniobra de una persona. El espíritu de esta norma es que un buque totalmente autónomo debe poder ser tomado por un operador remoto y actuar sobre la anomalía que estaría indicando la alarma en cuestión.
II – 2 Construcción – Prevención, detección y extinción de incendios
El convenio establece que la autoridad puede eximir a determinados buques del cumplimiento de esta parte si se concluye que su aplicación resulta innecesaria o sin razón en función de la zona de navegación cercana a la costa. En el caso de los buques sin tripulación habrá que ver qué es lo que determinan las autoridades de cada estado.
III – Dispositivos de salvamento
En el contexto de buques sin tripulación esta norma necesita revisión y adaptación por los estados, ya que no habrá personal a bordo.
IV – Radiotelegrafía y radiotelefonía
El CMI considera que la norma que exige que todo buque cuente con una persona de guardia capacitada para la operación de equipos de comunicaciones es uno de los mayores desafíos pues en el caso de los buques controlados a distancia, se podría transferir la obligación de escucha al operador remoto, pero en el caso de buques totalmente autónomos, sin tripulación a bordo, esto es un gran desafío.
V – Seguridad de la navegación
El CMI en su documento menciona que sin lugar a dudas, la Regla 14 sobre la necesidad de contar con una tripulación suficiente y eficiente es la de mayor dificultad para la operación de buques autónomos. Sin embargo también menciona que será cuestión de las autoridades de bandera emitir normas que – contando y contemplando la utilización de métodos de comunicación y tecnología innovativa – puedan considerarse técnicamente aptas. Será difícil al comienzo, se menciona.
La Regla 15 establece los principios para el diseño de los puentes de mando de los buques. Deben facilitar las tareas a ser llevadas a cabo por la tripulación y el práctico. Se menciona en este aspecto que un puente virtual tendrá que cumplir con estos principios para garantizar la seguridad de la navegación.
Sin embargo, aún en caso de que un controlador a distancia pueda tomar el mando manual del buque, no cumpliría con esta parte del Convenio.
Se menciona también en esta parte del SOLAS que los buques deben tener los mecanismos para facilitar el embarco de prácticos. Se menciona que eventualmente se podrá llegar a una transferencia del buque en forma remota, del operador a distancia hacia el práctico, también a distancia, para que – sin que físicamente embarque nadie – el buque sea conducido a muelle por el práctico también en forma remota.
La regla 33 menciona la obligación del Capitán de brindar asistencia a personas en peligro en el mar.
En la medida en que no haya nadie a bordo para prestar esta asistencia, la obligación podría cumplirse mediante el posicionamiento del buque en el lugar (que por carecer de tripulantes no podrá hacer otra cosa que permanecer en el lugar para coordinar las comunicaciones para el rescate). Esta obligación recaería sobre el operador a distancia.
VI -Transporte de granos e hidrocarburos
En este capítulo la norma establece que el cargador debe entregar al “Capitán o sus representantes” información sobre la carga y sus características. El CMI menciona en su documento que duda de que – ante la ausencia de tripulación – un controlador a distancia pueda cubrir esta norma.
VII – Transporte de mercancías peligrosas
El Código Internacional para el Transporte de Mercancías Peligrosas establece las normas que rigen para reportar los incidentes, y nuevamente aquí el CMI en su documento indica que dependerá de la tecnología si un operador a distancia que no esté a bordo pueda monitorear la carga en todo momento y tomar acciones ante un incidente.
VIII – Buques nucleares
Este capítulo establece que los buques de propulsión nuclear deberán cumplir con todas las disposiciones de la Convención.
IX – Gestión de la seguridad operacional de los buques
Se trata del Código ISM. Establece que se deberán definir las responsabilidades del capitán que deberán estar claramente especificadas, así como la descripción de las tareas a bordo, los procedimientos y la documentación. El documento en esta sección menciona que ante la falta de prácticas y experiencias con buques controlados a distancia, estas nuevas normas deberán ser desarrolladas, y que se considera que el Código ISM es una herramienta apropiada para ello.
X – Normas de seguridad para buques de alta velocidad
No se encuentran normas relevantes relativas a buques sin tripulación.
XI – Medidas especiales para incrementar la seguridad marítima
Se trata del ISPS Code (PBIP) que establece que la Autoridad de bandera establecerá normas y niveles de seguridad para sus buques. El CMI considera en su documento que se estará frente a desafíos importantes en el contexto de buques comandados a distancia o totalmente autónomos, en particular en lo referente a cyber-infiltración.
Es que el código establece que los buques deben estar provistos de un sistema de transmisión buque – tierra de alertas sobre la seguridad del buque o amenazas a ella. El sistema debe ser accesible desde el puente y desde otra posición a bordo. El CMI considera que en el contexto de buques sin tripulación este sistema deberá poder avisar a tierra que la seguridad del buque, incluyendo la cyber seguridad está comprometida.
XII – Medidas de seguridad adicionales para buques graneleros
El SOLAS establece que las alarmas audibles y visuales especificadas en el párrafo estarán situadas en el puente de navegación. Para el CMI será necesario que el operador a distancia tenga acceso a dichas alarmas por vía remota.
REGLAMENTO INTERNACIONAL PARA PREVENIR ABORDAJES EN EL MAR (RIPPA)
La regla 1 se aplica a todo buque en alta mar y en todas las aguas que tengan comunicación con ella y sean navegables para buques de navegación marítima.
La regla 2 que establece que ninguna disposición del RIPPA eximirá a un buque, o a su propietario, al Capitán o a la dotación del mismo de las consecuencias de cualquier negligencia en observar cualquier precaución que pudiera exigir la práctica normal del marino o las circunstancias especiales del caso.
También contiene esta regla una provisión de ….que se deberán tomar en consideración todos aquellos peligros de navegación y riesgos de abordaje
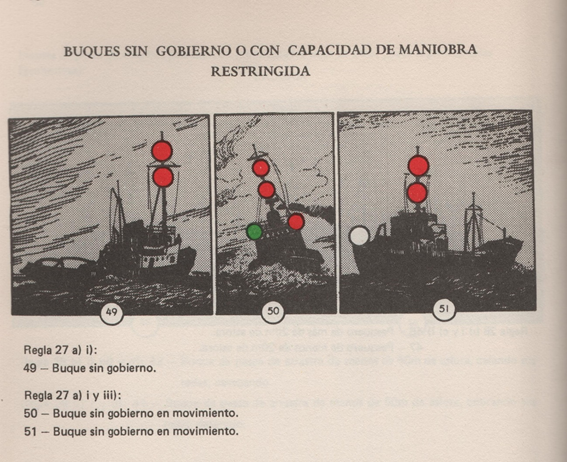
El CMI en su documento menciona que esta regla reafirma la importancia de buenas prácticas marinas por sobre el estricto cumplimiento del reglamento, y expresamente estipula que “ pudiera hacer necesario apartarse de este Reglamento para evitar un peligro inmediato”. La regla requiere una apreciación humana inmediata en el proceso decisorio para cumplir o desviarse de las reglas. En principio considera el CMI que esta regla podría llegar a cumplirse aún en el caso de un controlador a distancia de un buque sin tripulación, pero que en el caso de un buque totalmente autónomo no cumpliría con esta regla.
La regla 5 requiere una vigilancia visual y auditiva. Esto para poder apreciar las circunstancias y evaluar el riesgo de colisión. Dice el CMI que esta vigilancia implica la presencia de un ser humano. Los buques totalmente autónomos que se basan en tecnologías de algoritmos para evitar las colisiones no cumplirían con esta regla.
La Regla 8 establece que toda acción que se toma para evitar un abordaje será llevada a cabo de conformidad con lo dispuesto en las reglas de la presente parte y, que si las circunstancias del caso lo permiten, se efectuará en forma clara con la debida antelación y respetando las buenas prácticas marineras. El CMI en su documento menciona que en el caso de los buques comandados a distancia, y siempre que tengan instrumentos para captar el conocimiento situacional, esta norma se estaría cumpliendo, pero no aquellos buques totalmente autónomos y no controlados por humanos.
La regla 18 establece las obligaciones entre categorías de buques. En los incisos (a) (b) y (c) se establece que los buques de propulsión mecánica, los buques de vela y los buques dedicados a la pesca en lo posible se mantendrán apartados de la derrota (rumbo) de un buque “sin gobierno”. El documento del CMI menciona que esta regla está referida a los buques que en forma extraordinaria sufren una avería que los inhabilita para mantenerse apartados de los demás buques. De ocurrirle esto a un buque comandado a distancia, por una parte sería necesario poder establecer las luces y/o marcas diurnas de “buque sin gobierno” y por el otro no se podría asimilar a los buques operados a distancia como “buques sin gobierno” en los términos de esta regla.
La Parte C del RIPPA cubre las luces y marcas que deben exhibir los distintos tipos de buques según su actividad y operaciones. Menciona el documento que todo buque no tripulado deberá ser capaz de – como mínimo – detectar dichas luces y marcas diurnas.
También menciona el documento que las reglas permiten que los Gobiernos acepten un cumplimiento lo más cercano posible a las condiciones técnicas estipuladas para luces y marcas y señales sonoras. Igual criterio es permitido para buques “de construcción especial” Resta ver si los distintos gobiernos permitirán a los buques no tripulados beneficiarse con alguna o todas estas exenciones.
4.6 – UNA EXPLORACIÓN DE LAS NORMAS O LEYES PARA LOS BUQUES NO TRIPULADOS – Captain Andrew Norris, Escuela de Guerra Naval – US NAVY
Bajo el título de Status Legal de los Sistemas Marinos sin Tripulación (Unmanned Maritime Systems UMSS) el Cap. Norris comienza su extenso documento sobre el tema (del cual la presente es apenas una síntesis) con la afirmación de que el status de esos sistemas es incierto tanto en la legislación internacional como en la doctrina de los Estados Unidos de Norteamérica.
En primer lugar, apunta, falta clarificación de si tales sistemas pueden ser considerados “buques” y adicionalmente, cuáles de dichos buques calificarían como Buques de Guerra con lo que ello implicaría.
Para la US Navy los UMS son considerados “artefactos” . Ello es un problema pues como “artefactos” carecerían de ciertos derechos de navegación, de ciertas inmunidades y carecerían de facultades para llevar a cabo ciertas funciones marítimas, además de ser un problema en el régimen legal marítimo internacional para ejercer los derechos que la Declaración de París de 1856 otorga a los estados beligerantes y a los estados neutrales.
Plantea Norris si los UMS:
- Deben ser considerados como unidades independientes de la unidad militar o civil que las lanzó?
- Cuáles de los UMS pueden ser considerados “buques” y cuáles no. En este caso se los debería definir como artefactos u otra denominación?
- Para aquellos UMS que sean susceptibles de ser considerados “buques”, cuáles caen dentro de la categoría de “buques de guerra”?
- En el caso de los UMS provistos de armas, cuáles deberían ser catalogados como “plataformas de lanzamiento de armas” y cuáles deberían ser “armas” en sí mismas.
Para él, no hay nada en la reglamentación internacional que impida que un UMS pueda ser considerado un buque, y también, nada que lo permita u obligue a ello.
Analiza – como en otros trabajos sobre el tema – la incidencia de la CONVEMAR en este aspecto, en cuanto al Art. 94 (todo buque debe estar al mando de un capitán y tripulación….)
En cuanto a Buque de Guerra, la doctrina estadounidense considera que todo buque con la sigla USS (Marina) o USCGC (Coast Guard) que estén al mando de un oficial de esa fuerza califica como buque de guerra, no así las unidades menores que suelen estar a cargo de suboficiales ni los demás buques auxiliares, UMS y buques del Military Sealift Command (transportes de tropas y pertrechos).
El Capitán Norris hace una incursión en los drones aéreos, y traza un paralelismo con los buques, ya que para un dron aéreo no importa si el operador está embarcado o controlando a distancia.
Para Norris, la determinación de si es o no es un buque, tiene importancia por ejemplo en la determinación de “Paso inocente” establecido en la CONVEMAR.
Debido a que la mayoría de los UMS son construidos, lanzados y operados con el fin de obtener información en perjuicio de la defensa del estado ribereño en cuyo mar territorial está operando el UMS, es altamente probable que no se les conceda el derecho a Paso Inocente.
Las disposiciones de la CONVEMAR sobre tránsito por el mar territorial o estrechos internacionales no son aceptadas por la US NAVY tales como respetar esquemas de separación de tráfico, etc.
Norris se explaya sobre la Inmunidad de los buques de guerra y su aplicación a los UMS. Destaca que en caso de que los UMS no califiquen como buques, no estarán alcanzados por la inmunidad que otorga la CONVEMAR a los buques de guerra.
En cuanto a las funciones que podrían desarrollar los UMS, y dependiendo de si son o no considerados buque, no podrían utilizarse para la persecución de piratas (art 107), o para ejercer el derecho de abordaje e inspección (art 110) o en la persecución de naves y sus botes (Art. 111)
Propuestas concretas de NAVSAC (US Navigation Safety Advisory Council. Un grupo de expertos seleccionados para preparar recomendaciones al USCG sobre el RIPPA)
Menciona el Cap. Davis en su documento que la NAVSAC ya ha emitido sus recomendaciones de modificaciones a las Reglas para Prevenir los Abordajes como sigue:
- Que se introduzca un cambio en la regla 5 del RIPPA consistente en eximir a los buques no tripulados de la obligación de mantener un vigía visual y auditivo.
- Que en la regla 3(g) que define un buque sin gobierno, se incluya a los “buques con propulsión propia que navegan sin tripulación, controlados en forma remota o autónomos”.
- Que en la regla 27 se modifique las luces a ser exhibidas por un buque no tripulado para que – cuando opera sin tripulación – en lugar de las luces de esta sección exhiba solamente tres luces visibles todo horizonte, rojas la superior y la inferior, y blanca la del medio. De día, una marca consistente en una bandera rígida con la letra D del Código Internacional de Señales que sea visible 360 grados.
El autor repite las consideraciones que constan en el documento del CMI comentado en el punto anterior (pág. 38) sobre SOLAS y analiza el código ISM, El STCW y el MARPOL.
También analiza el tema de derechos beligerantes de las naves no tripuladas en base al Acuerdo de Paris.
4.7 – LA LEX MARÍTIMA SOBREVIVIRÁ A LA DESAPARICIÓN DE LOS MARINOS? Prof. Eric Van Hooydonk, Research Professor University of Ghent
En este documento emitido en 2014 el Profesor Van Hooydonk expone su visión sobre la posibilidad cierta que tiene la Ley del Mar (CONVEMAR) y diversas normas públicas y privadas para sobrevivir a la introducción de buques sin tripulación, sean estos controlados a distancia o totalmente autónomos.
Se pregunta cuáles cambios serán necesarios en las normas existentes para que estas flotas de futuros barcos fantasma puedan ser contemplados, anticipando su mirada optimista de que no es necesario alarmarse por esta necesidad de cambio.
Van Hooydonk parte de la base de que varias de las instituciones del derecho marítimo se remontan a cientos de años atrás. Las figuras del capitán, el práctico, el contrato de fletamento, el conocimiento de embarque, las responsabilidades por daños por colisiones, el salvamento marino, la avería gruesa, la limitación de la responsabilidad, los seguros marítimos, el embargo e interdicción de salida de buques, etc. todas ellas se derivan de normas nacionales y locales y algunos documentos de épocas pre napoleónicas, o aún de la Edad Media. Algunas de estas instituciones se originan en la Antigüedad.
Considera el autor que en los últimos 200 años este conjunto que él llama Lex Marítima ha resistido como una roca las furiosas corrientes de los cambios políticos y tecnológicos. En efecto, normas que fueron establecidas en la época de la navegación a vela se han adaptado eficientemente a la era del vapor, el diésel, y la propulsión atómica, también al constante incremento en el tamaño de los buques y los puertos, se han adaptado a dos guerras mundiales, se han adaptado además a las necesidades de nuevos Estados soberanos que han surgido, también a la introducción de las cargas unitizadas que son capaces de ser transferidas sin notables interrupciones a otros modos de transporte, y se han adaptado a la indignación popular por masivas contaminaciones del medio debido a derrames de hidrocarburos transportados por vía marítima.
Esta supervivencia de la Lex Marítima se mantiene gracias a su capacidad de cambio, de adaptación a todos esos cambios, producidas en parte por la armonización internacional de algunas de las normas, así como por la estandarización de los requerimientos.
Para entrar de lleno en el tema, propone una unificación en la terminología con que los buques sin tripulación se mencionan en diversos estudios y presentaciones.
Detecta que primero es necesario separar aquellos aparatos no tripulados tales como torpedos, robots, cápsulas, y boyas que no son buques, y sostiene que es mejor considerarlos como pertenecientes a la nave que los desplegó.
El Profesor Van Hooydonk menciona que su documento fue preparado para un proyecto de la Comunidad Europea (European 12 C Project) que tenía como propósito el desarrollo de un sistema integrado y parcialmente automatizado de monitoreo para detectar amenazas a la actividad marítima) . En 2013 se hizo una demostración de un artefacto no tripulado para estos propósitos en el Mediterráneo.
Menciona que este trabajo sobre Lex Marítima surgió para cubrir lo que él considera que aún está faltando: una total revisión y estudio del estatus legal de los buques de superficie, sin tripulación, para transporte de cargas y pasajeros.
Se propone explorar cuales normas que existen en la actualidad pueden ser aplicadas, cuáles será necesario modificar y cuales nuevas reglas deberán ser establecidas.
Menciona que aún no está claro cuál sería el Modelo de Negocios que soportaría la operación de buques sin tripulación, ni de cómo organizar los servicios que tales naves requerirán, ni de cómo estos costos serían repartidos entre los participantes, ni de cuales contratos serían necesarios para ello.
Se deberán cubrir los riesgos de tal navegación sin personas a bordo, aunque en realidad el factor humano no será completamente eliminado toda vez que algunos de esos futuros buques serán controlados por un operador en tierra, quien estará imposibilitado de reaccionar intuitivamente en base a lo que ve y escucha, como lo haría una persona ubicada a bordo.
El profesor Van Hooydonk hace un extenso análisis de las reglas de la CONVEMAR, la Convention on the Prevention of Marine Pollution by Dumping of Wastes and other Matter de 1972, La United Nations Convention on Conditions for Registration of Ships, La Convención para Prevenir los abordajes (RIPPA) , La Convención MARPOL, la Wreck Removal Convention, la Convención para la remoción de restos náufragos, la Convención sobre Salvamentos, la Convención sobre el arresto (interdicción de naves) de 1926, la Convención sobre Hipotecas Navales, y la LLMC.
Basado en dicho análisis concluye que con un alto porcentaje de certeza la existencia a bordo de un capitán y tripulación no es esencial para que sea considerado un buque según surge de dichos documentos, y que por lo tanto los buques sin tripulación no tendrían problema para ajustarse a las definiciones de dichas convenciones.
Abanderamiento
El Profesor Van Hooydonk plantea que respecto de las provisiones de la CONVEMAR sobre el capitán, oficiales y tripulación en el caso de los buques sin tripulación la alternativa de que (a) o bien no tienen sentido y por lo tanto no se aplicarían, o bien (b) deben ser aplicadas a quien controla el buque desde tierra.
Aclara que en realidad (b) sería aplicar una analogía, método no aceptable para el derecho internacional.
Relación genuina con el estado de abanderamiento
Plantea que no tiene sentido esta relación de la CONVEMAR cuando un buque sin tripulación tiene un propietario que no reside en el país de bandera, nunca toca los puertos de dicho país, y que además será controlado por un operador anónimo desde un escritorio situado en un país de bajos costos laborales, o peor aún, controlado por un programa de computadora creado en cualquier otro país, operando desde “la nube”. Dice que en lugar de ser genuino dicha relación sería totalmente virtual.
Se pregunta cómo harán los estados de abanderamiento para:
- controlar la existencia a bordo de los certificados que establece la CONVEMAR?,
- para que se cumpla con las disposiciones sobre asistencia a personas en peligro en el mar?,
- para que luego de una colisión el buque preste asistencia al otro buque con tripulación?
- Se considerará que un buque cuyo sistema de control ha sido hackeado sea un buque pirata?
- Cómo ejercerá el derecho de visita?
- Cómo el de persecución?
Plantea que durante un período que seguramente sobrevendrá de la coexistencia de buques con y sin tripulación, que además será extenso, se deberán emitir las reglas para evitar que los buques con tripulación a bordo se vean en situaciones de peligro por parte de buques sin tripulación.
Analiza al igual que en los documentos comentados en esta sección de otros autores cuáles y cómo serán transferidas a los controladores en tierra las obligaciones de los capitanes en buques convencionales.
Plantea dudas sobre si los buques totalmente autónomos podrán lograr los estándares de “buenas prácticas marineras” (good seamanship) por más buena comunicación y tecnología con que estén dotados.
Los controladores de buque a distancia
Plantea el documento que se deberán establecer las normas para llevar el registro de quienes actuaron como controladores a distancia del buque sin tripulación, de qué requisitos deberá tener el soporte de datos que en los buques convencionales es anotado en el Diario de Navegación (rumbo, velocidad, posición, etc.) y bajo cuales condiciones el controlador de tierra deberá participar de las actuaciones ante las cortes.
Las entradas y salidas de puerto
Analiza el documento la alta probabilidad de que sea necesario para los buques sin tripulación que al partir o al llegar a puerto se embarque un team de gente, incluyendo a un capitán con lo cual se cumpliría con el adagio de que el capitán debe estar en el puente durante las entradas y salidas de puerto.
Sucede lo mismo al considerar el tema de los remolcadores de puerto: Quien tendrá la responsabilidad de la conducción del buque?
El capitán del remolcador o el controlador a distancia?
Con el tema del embarco y desembarco de los prácticos y pilotos resulta obvio que el controlador a distancia se beneficiará con el asesoramiento del práctico.
Pero, ¿se pregunta el autor, que responsabilidad criminal le cabe al propietario, o al operador remoto en caso de daños y accidentes? ¿Y cómo se sancionará a tales personas si están en un país remoto?
El autor menciona la posibilidad de una profunda reforma de las normas para que el práctico también actúe a distancia desde una posición remota y guie al buque tomando acción directa.
Analiza en profundidad los temas emergentes de las relaciones entre fletador y fletante en los contratos de Time Charter y Voyage Charter, así como los del contrato de arrendamiento a casco desnudo.
Concluye que la Lex Maritima sufrirá un cambio fundamental en el futuro para adaptarse a los buques sin tripulación.
5 – IMPACTO LABORAL
5.1 – LA RESISTENCIA A LOS CAMBIOS
Aquellos cambios que erosionan puestos laborales se han encontrado desde el comienzo de la historia con una férrea oposición.
Y esto se aplica no sólo a la actividad civil, sino también a la militar.
Un estudio encomendado por el Ejército Británico con posterioridad a la I Guerra Mundial para determinar la necesidad o no de personal en las distintas actividades castrenses detectó, durante la visita de los auditores a un ejercicio de disparo de artillería que, entre los operadores de la batería de cañones terrestres, dos soldados no tenían otra actividad aparente que la de – previo a cada disparo – taparse los oídos con ambas manos.
Preguntados cuáles eran sus funciones al encargado de la batería, respondió que ellos son los que “cuidan los caballos para evitar que se escapen con cada disparo”.
Hacía años que los cañones eran remolcados por camiones u otros vehículos motorizados….
Un ejemplo más Porteño y cercano fue relatado por un Capitán de buque mercante extranjero que – en uno de los primeros viajes al Puerto de Buenos Aires con carga general paletizada en los entrepuentes de las bodegas del buque – y pretendiendo prescindir de la participación de los estibadores del puerto pues el buque contaba con moto-elevadores para elevar y mover los pallets, se encontró con que el sindicato le respondió que ellos no tendrían problema en que la descarga se hiciera sin estibadores, sólo con las máquinas, pero – y debido a su peligrosidad – iban a armar dos líneas humanas todo a lo largo del recorrido desde el muelle hasta el depósito fiscal con estibadores, “ para evitar que alguien se lastime con las maquinas”…
5.2 CÓMO HAN CAMBIADO LAS TRIPULACIONES – Revista Fairplay Mayo 1983
El marinero de la época de la vela era insolente y cruel para con aquellos más débiles que él, servil cuando en presencia del Capitán, y avaro con muchas cosas, pero conocía su trabajo. Sus ideas eran cerradas y angostas, y ninguna longitud de sus viajes le permitieron aprender algo sobre el mundo, pero conocía su buque.

Cuando tenía que treparse a las gavias para maniobrar las velas con mal clima maldecía todo el tiempo si el oficial no lo escuchaba, pero cumplía con su trabajo no importaba cuan malas eran las condiciones.
Maldecía durante cada comida, deseaba lo peor para el armador y su familia, contra el capitán, contra el cocinero que saló el estofado, contra quien inventó los gusanos que invadían todas las galletas, pero se mantenía razonablemente sano, y sólo una comida absolutamente podrida lo hacía estallar en ira.
Mientras pudiera libremente usar lenguaje inapropiado y grosero se comportaba como una persona razonablemente paciente, que se aguantaba todo lo que viniera durante su vida a bordo y era sumamente eficiente y conocedor de su trabajo como marinero.
Comenzaba su vida laboral a los 12 años, sus alojamientos no estaban ni siquiera a nivel de un establo para cerdos, y sin embargo eran buenos marineros.
Cuando terminaba su período a bordo de varios meses y bajaba a tierra se entregaba a los placeres baratos, al alcohol y si tenía familia volvía a ella al cabo de un tiempo.
El trabajo se hacía casi todo en forma manual, muy pocas piezas mecánicas, y el trabajo era rudo.
Con el tiempo, y la participación de las organizaciones internacionales que velan por las condiciones de trabajo, esto ha cambiado.
5.3 – LAS TRIPULACIONES DE LOS VAPORES – Michael Grey, revista Fairplay
El principal factor al pasar de la vela a la propulsión mecánica fue cierta disminución de las tareas brutas físicas, y aunque parezca contradictorio, un notable número de tripulantes para hacer la maniobra.

En la foto se ve el castillo de proa de un pequeño vapor en 1920, en un puerto del Golfo Pérsico, en el que se ven 10 hombres. En la popa debería haber otro tanto, más una media docena en el puente, todo ello sin contar los maquinistas, foguistas, y cocineros. Un total de unas 40 personas para hacer funcionar este buquecito que muchos años más tarde funcionaría con apenas 12 personas.
5. 4 TRIPULANTES ABURRIDOS
En 1995 la firma Lauritzen, armadora de buques especializados en el transporte de cargas en contenedores frigoríficos, anunciaba que su mayor nave, la DITLEV LAURITZEN de 164 m. de eslora, 24 m. de manga, 15,70 m. de puntal, equipado con un motor MAN B&W GL60MC, y con capacidad para 482 TEUS podía navegar con sólo seis tripulantes.
Esto era posible gracias a tener un sistema de control integrado que hacía uso extensivo de computadores, y que las funciones de navegación, carga y la sala de máquinas podía ser controlada por un solo hombre desde el puente.
En realidad, lo operaban con 9 personas.
El práctico de Puerto Buenos Aires capitán Abelardo (Beto) Banini era quien frecuentemente le tocaba actuar tanto en las entradas como en las salidas de puerto.
Le comentó al autor de esta investigación que, en esa época, el capitán del buque le había comentado que era su último viaje, porque se aburría durante la navegación.
No tenían con quien conversar, pues los que estaban despiertos cubrían cada uno su puesto de trabajo y los que no estaban de guardia estaban durmiendo.
5.5 – LA CREACIÓN ARTIFICIAL DE PUESTOS A BORDO
Esta es una descripción de lo que ha sucedido en la Marina Mercante de Argentina.
A pesar de la modernización paulatina de la flota mercante argentina, la autoridad encargada de fijar las dotaciones mínimas de seguridad ha tenido épocas en las que la determinación de dotaciones mínimas se podía considerar adecuada a la lenta modernización de los buques, y también otros períodos en los que resulta evidente una conexión con las organizaciones gremiales tendientes a no perder puestos de trabajo.
Si bien es cierto que las dotaciones de explotación las debería fijar el armador, no lo es menos que el gremio que agrupa a la marinería y personal auxiliar de sala de máquinas ha negociado, exigido y finalmente logrado incrementar la cantidad de puestos a bordo en forma totalmente desconectada con la real necesidad de tanta gente a bordo.
La caída en la cantidad de buques que integran la flota mercante argentina ha sido la causal de presiones para incrementar la cantidad de tripulantes en la cada vez menor cantidad de buques en actividad.
Quizás sea una situación que perdura de tiempos políticos pasados, en los que la presión de los gremios sobre la Autoridad producía estos desarreglos, pero no tiene explicación en los tiempos actuales y debería ser corregida.
5.6 – EL FUTURO PARA LOS OFICIALES Y TRIPULANTES
La mayoría de los autores que se han ocupado del tema de la nueva generación de buques sin tripulación considera que será una profesión nueva, a ser establecida con su currícula académica adecuada, la del “controlador” o “capitán a distancia” para estos buques, así como otra profesión nueva la del maquinista para poner en marcha y mantener los motores de estos nuevos buques.
En las entradas a puerto seguirá siendo necesario que un team de gente aborde el buque que llega para atender la maniobra de amarre, y lo contrario cuando el buque esté listo para partir de puerto.
El Profesor Dr. Erik Van Hoydonk (ver 4.7 en página 49) menciona en su estudio sobre el tema que al igual que ha sucedido con otras ramas de la industria que han sido sometidas a procesos de automación en el pasado, este tema de las tripulaciones desplazadas tendrá una dimensión social importante.
Se pregunta:
- qué sucederá con las ocupaciones que ya no serán requeridas?
- Qué nuevas formas de empleo, entrenamiento y certificación serán necesarias?
- Cuáles serán los umbrales de la presión psicológica que deberán poder soportar los futuros operadores de buques no tripulados?
- Aceptarán los pasajeros viajar en buques sin tripulación?
- Aceptará la opinión pública, los ambientalistas y los políticos el paso de buques tanque sin tripulación transportando contaminantes frente a sus costas?
- Se les permitirá el acceso a los puertos?
En un reciente artículo sobre este tema, se comentó que con la industria marítima experimentando un sólido desarrollo de los buques autónomos y su operación, el foco de atención se ha colocado en los Centros de Control de Tierra, desde los cuales el comando, el control y el monitoreo de los buques será llevado a distancia.
Falta establecer cuáles serán las competencias detalladas del Operador Remoto.
En este sentido, han estado en contacto y conduciendo entrevistas con personas de diferentes orígenes (académicos, encargados de reglamentación, desarrollistas de tecnologías, y otras capacidades)
Del resultado de estas entrevistas surgieron tres áreas de competencias clave:
- Comprensión de Sistemas
- Conocimiento de tecnologías y de comunicaciones
- Competencias marinas
Determinaron además que se necesitará que estas personas además posean conocimiento de las regulaciones marítimas, competencias en la navegación de buques, y conocimientos básicos de ingeniería.
Las reuniones identificaron otros aspectos, tales como el alcance de las nuevas reglamentaciones para los buques autónomos, y un plan para la distribución de tareas entre el personal de esos futuros Centros de Control.
Finalmente, concluyen, serán varias las modificaciones de estos requisitos de competencias de los operadores a medida que transcurra el tiempo y se adquiera experiencia, y además de cómo evoluciona la tecnología.
6 – TRANSFORMACION DIGITAL (Digital Disruption)
El efecto disruptivo de la transición cada vez más acelerada hacia el “shipping virtual o digital”.
- – La frase que probablemente más se escuche en los próximos tiempos será “eso que le dije hace dos meses, ya no es actual… ha cambiado”.
Según Lloyds List, el mayor desafío de los buques autónomos no es el aspecto técnico sino la gran adaptación mental que tiene que hacer el Management de las empresas marítimas para comenzar a pensar en el desafío de esta nueva generación de buques.
Hay que explicar a personas que hace tiempo que están inmersas en una determinada cultura empresarial que el cambio es permanente, y cada vez que se lanza una innovación se transforma el mundo a nuestro alrededor, especialmente el digital.
Esta adaptación se tiene que extender a la manera de hacer negocios, ya no en la forma tradicional y analógica sino digital.
- – MUNIN, MARITIME UNMANNED NAVIGATION THTOUGH INTELLIGENCE IN NETWORKS.
Es la entidad que estudia la próxima generación de sistemas modulares de control y comunicación para monitorear en forma inalámbrica tanto operaciones sobre el agua como desde tierra de buques autónomos.
El proyecto se basa en la integración de sensores infra rojos y del espectro visual, cámaras suplementadas por radar y AIS, todos los cuales proporcionarán datos para uso en la navegación de los buques.
También contiene un módulo de sistemas de navegación en alta mar, capaz de hacer maniobrar a los buques autónomos teniendo en cuenta las reglas del RIPPA, y de las condiciones meteorológicas.
Los sistemas son capaces de operar en forma autónoma pero también le permiten al controlador a distancia tomar el control manual del buque. Esto se logra gracias a la confiabilidad de las comunicaciones por satélite, con una buena interfase y cuidando la Ciber Seguridad.

También incluye un módulo de Soporte para Maniobra remota, que es de aplicación cuando el buque autónomo se encuentra en aguas restringidas, tales como estrechos, canales, etc. y toma los datos del historial de maniobras del propio buque.
Existe otro módulo de Monitoreo continuo de las Máquinas, que además se usa para mantenimiento preventivo y de esa manera evita averías. Estos monitores están en contacto con una estación terrestre que puede tomar los datos y trabajar con ellos.
Otro módulo se ocupa de un Sistema de Mantenimiento Interactivo, similar al descripto en el párrafo anterior pero con foco en mantenimiento para evitar averías.
Finalmente, y también a bordo, cuenta con un sistema de eficiencia energética. El buque modelo tiene dos motores, mucho más automatizados que los que existen en la actualidad, con todos los sistemas esenciales duplicados.
Desde tierra, el Centro de control suplementa los sistemas automáticos y autónomos de a bordo y permite intervenir en caso de incidentes mayores.
Respecto del personal, establece que hay que determinar los estándares de entrenamiento para las personas a cargo del centro de control remoto de buques, sobre las cantidades de ese personal para operaciones normales, sobre la cantidad de gente necesaria en el centro de control para una situación de búsqueda y rescate, etc.
- – GOBIERNO JAPONÉS LLEVA A CABO INVESTIGACIÓN Y DESARROLLO DE TRANSMISIÓN DE DATOS Y ESTÁNDARES DE OPERACIÓN DE BUQUES AUTÓNOMOS.
El gobierno de Japón quiere tener desplegada la tecnología para evitar colisiones y operación de buques sin tripulación en 250 unidades de esa bandera, para el año 2025.
También apunta a las normativas nacionales japonesas e internacionales para dichas operaciones.
- – RADIO HOLLAND GROUP, un especialista en comunicaciones, navegación electrónica y automación ha firmado un acuerdo estratégico con SISCO, especialista en información y tecnología de la información.
Con el fin de instalarse en la futura digitalización de la actividad naviera en Holanda y el mundo, ambas empresas líderes en sus áreas, estarán ofreciendo servicios de monitoreo remoto y de diagnóstico, data management y redes informáticas a bordo.
Los funcionarios de Radio Holland mencionaron que con esta alianza esperan poder concentrar 100 años de experiencia en paneles para mostrar información útil para sus clientes que les permitirá optimizar sus operaciones y reducir costos.
Por su parte los funcionarios de Sisco anunciaron que juntamente con el gobierno de los Países Bajos están gestionando un fondo de inversiones para estimular la aceleración de la digitalización en su país.
International Tug & OSV. Marzo 2017
- – DNV-GL OTRA VEZ ES NOTICIA CON SU RV (Realidad Virtual) con la que se puede construir un gemelo digital de un buque real, y establecer cómo se lo controla remotamente.
La sociedad de clasificación informó en una conferencia de prensa que están utilizando tecnología de drones para las inspecciones de naves. Con los drones pueden inspeccionar bodegas y tanques gigantes.
Anunciaron el lanzamiento de una plataforma de management de datos denominada Veracity, con la que pueden custodiar los datos de sus clientes en un ambiente de seguridad, y con los cuales se podrá crear valor agregado a futuro.
- – ABS (American Bureau of Shipping) SOCIEDAD DE CLASIFICACIÓN SE HA UNIDO A UNMANNED CARGO SHIP DEVELOPMENT ALLIANCE.
En Junio de 2017 se lanzó en Shanghai esta alianza, dirigida por la compañía china HNA Technology Group Co. y está integrada por CCS, China Ship Research Institute, Hudong-Zongua Shipbuilding Group Co, Marine Design Research Institute of China (MARIC), Rolls-Royce y Wartsila.
El objetivo es desarrollar y lanzar un buque autónomo de carga, hacia fines de 2021.
ABS anunció su ingreso a la U.C.S.D. Alliance para aplicar las últimas tecnologías al desarrollo de un nuevo concepto de buque autónomo.
En la Alianza sostienen que el incremento en la digitalización y la conectividad con que está operando ya hoy la industria naviera, darán lugar a que en un futuro muy cercano se verán grandes cambios en la forma en que los buques se diseñan y se construyen.
- – ONE SEA , AUTONOMOUS MARITIME ECOSYSTEM FOR AUTONOMOUS SHIPPING.
Wartsila Corporation ha anunciado que se ha asociado bajo este nombre en 2016 con otras empresas líderes en tecnología de la información para desarrollar un ecosistema que permita la navegación de buques controlados totalmente en forma remota en el Mar Báltico dentro de tres años, y lograr tráfico comercial marítimo autónomo en 2025.
La integran ABB, Cargotec (McGregor y Kalmar) Ericsson, Meyer Turku, Rolls-Royce, Tieto y Warstila. Tiene el apoyo de la Asociación Finlandesa de Industrias Marinas y financiación de Tekes.
Destacan que, a diferencia de otras investigaciones de tipo académico, las compañías que integran One Sea son todas líderes en sus respectivos sectores lo cual les permite una aproximación a los temas que es industrial más que teórico.
Serán capaces de proveer una red para el shipping autónomo bien diseñada, probada y segura.
La fecha de entrada en escena de estos productos hace pensar a One Sea que los encargados de escribir los cambios en las normas para permitir la operación de los buques autónomos deberán apurar el paso, si es que no quieren quedar retrasados respecto de la gran velocidad de avance de la tecnología.

El grupo está elaborando el lanzamiento en breve de los pasos (roadmaps) para los temas a ser abordados como Operaciones, Técnicos, Seguridad, Reglas legales, control de tráfico y éticas entre otras. Los estudios en estos campos están dirigidos a facilitar la entrada en vigencia de los sistemas para la fecha indicada… 2025.
Enfatizan en One Sea que la operación de los buques del futuro se basa en decisiones tomadas autónomamente en base a datos, algoritmos, inteligencia artificial y optimización. Estos cambios modificarán los roles de la gente de mar y también de los que trabajen en tierra. Wartsila Corporation
6.8 – AAWA , ADVANCED AUTONOMOUS WATERBORNE APPLICATIONS- ROLLS ROYCE
Palabras del presidente de Rolls-Royce
El presidente de Rolls Royce Marrine Sr. Mikael Makinen dijo que los buques autónomos son el futuro de la industria marítima. Tan disruptivos como los Smart phones el Smart ship va a revolucionar el diseño y la construcción de naves.
Hace 10 años la sola idea de que se podría manejar nuestras vidas a través de una pequeña pantalla de vidrio se consideraba casi imposible. Hoy, pocos querrían vivir sin ella, dijo.
Hace dos años, la mención de buques inteligentes era mirada como una fantasía futurista.
Hoy las posibilidades de un buque mercante transportando carga y controlado remotamente para fines de la década es una realidad.
Hoy en día la tecnología de sensores que se necesita para hacer realidad los buques autónomos ya existe. El desafío es encontrar la forma óptima de combinarlos en forma confiable y económica.
Los algoritmos de decisiones que ayudarán a estos buques a decidir qué acciones tomar en base a la información de los sensores se está ensayando y perfeccionando.
El desarrollo de los programas de soporte de esas decisiones será gradual, iterativo, y sujeto a extensas pruebas y simulaciones.
Para obtener la aprobación de las autoridades regulatorias estos buques deberán ser al menos igual de seguros que los convencionales. Tienen el potencial de reducir los errores humanos, pero al mismo tiempo nuevos riesgos aparecerán y se los deberá enfrentar. Se necesita un esquema estructurado y abarcativo para enfrentarlos.
Los buques sin tripulación abren una etapa nueva en el diseño y construcción de los mismos, ya que no se necesitarán los bloques de acomodación ni puente de mando, y muchos de los sistemas a bordo de los buques hoy en día están dedicados a la tripulación. Su ausencia permitirá reducir equipamiento, e incrementar los espacios para la carga.
Para que estos buques autónomos puedan operar se necesitará de la participación de seres humanos desde los puestos de control y mantenimiento en tierra, y se necesitará
de conectividad y comunicaciones bidireccionales de excelente calidad, con soportes redundantes y minimización de riesgos.
AAWA – Proyecto de 6,6 millones de Euros El proyecto está financiado por Tekes (Finnish Funding Agency for Technology and Innovation). Consiste en producir las especificaciones y los diseños preliminares para la próxima generación de soluciones avanzadas para buques autónomos.
Participan de AAWA Tampere University of Technology, VTT Technical Research Centre Finland Ltd, Abo Akademi University; The University of Turku, y miembros del grupo de empresas Rolls-Royce, DNV-GL, inmarsat, Deltamarin, NAPA, Brighthouse Intelligence, Finferries y ESL Shipping.
Se proponen obtener las respuestas a las siguientes preguntas:
- Qué tecnología se necesita y cómo mejor combinarla para permitir que un buque opere en forma autónoma a muchas millas de la costa?
- Cómo lograr que un buque autónomo sea al menos igual de seguro que uno convencional?
- ¿Qué nuevos riesgos deberá enfrentar y cómo pueden ser mitigados?
- ¿Cuál será el incentivo para que los armadores y operadores inviertan en buques autónomos?
- ¿Es legal la operación de buques autónomos?
- ¿Quien será responsable en caso de accidente?
La tabla de Sheridan
Existen diversas definiciones de autonomía y de inteligencia de las máquinas en la literatura, pero la más conocida es la ideada por Thomas Sheridan, que va desde una máquina controlada totalmente por humanos hasta una maquina sin ningún control por humanos.
| 10 | La computadora realiza todo en forma autónoma, ignora al humano |
| 9 | La computadora informa al humano solo si ella lo decide |
| 8 | La computadora informa al humano solo si es consultada |
| 7 | La computadora ejecuta automáticamente, informa al humano si es necesario |
| 6 | La computadora permite un tiempo limitado de veto antes de ejecutar automáticamente |
| 5 | La computadora ejecuta la acción sugerida si es aprobada por el humano |
| 4 | La computadora sugiere una sola alternativa |
| 3 | La computadora resume las alternativas a solo unas pocas |
| 2 | La computadora ofrece la totalidad de las alternativas |
| 1 | La computadora no ofrece ninguna asistencia, todas las decisiones y acciones en manos del humano |
6.9 – BIMCO – CONFERENCIA SOBE CYBER SEGURIDAD – Centro Marítimo de Buenos Aires
En una conferencia dada en el Centro de Navegación durante Septiembre 2017 el Sr. Aron Sorensen de BIMCO (Baltic and International Maritime Conference ) expuso las actividades y recomendaciones de esa entidad respecto de la Cyber Seguridad.
BIMCO tiene 2500 socios en 120 países y se calcula que el 60 % de la flota mundial mercante es operada por un miembro de la institución.
Este tema ha sido recurrente en casi todas las conferencias y seminarios y publicaciones de la actividad marítima en los últimos tiempos. De un extremo se encuentran los escépticos que descartan la amenaza, mientras que en el otro están los que se preocupan por la posibilidad de que personas actuando maliciosamente puedan tomar el control de las operaciones de los buques.
Sea cual fuere la posición sobre el tema, los recientes ataques sobre Maersk, y el así denominado “ransomware” o pedido de rescate para liberar archivos y bases de datos capturadas maliciosamente, demuestran que son un riesgo cierto, que le costaron a la compañía entre 200 y 300 millones de euros, por interrupción de terminales, suspensión de operaciones y pérdidas.
Maersk pudo detectar que el ataque que sufrió comenzó como un hakeo ruso a Ucrania, pero infectó sistemas de la línea marítima pues todo está conectado con todo.
Expuso el Sr. Sorensen que la mayoría de los ataques son ejecutados por empleados insatisfechos y/o por venganza
Para detectar las vulnerabilidades a los sistemas de a bordo, Bimco formó un equipo especial integrado por hackers que habían sido navegantes, que fueron contratados especialmente, y se los embarcó en 6 buques para detectar cómo de expuestos estaban sus sistemas.
Encontraron alarmantes señales de descuido, como por ejemplo que los manuales de operación de los aparatos tenían las passwords impresas, que los operadores de aparatos tenían las passwords escritas y adheridas en los monitores, que habían instalado cableado no declarado en los buques que les permitía operar sin ser detectados y que no había control sobre el uso de USB, entre otras.
El Sr. Sorensen mencionó que los Port State Control (Estado Rector de Puerto) harán revisiones a bordo de los buques a partir de 2022 para verificar el cumplimiento de las medidas para protección de Cyber Seguridad.
Aquellos armadores u operadores que sufran un ataque cibernético y no puedan probar que habían tomado los recaudos para evitarlos, corren el riesgo de que sus buques sean declarados como Unseaworthy. (perdidas sus aptitudes navegatorias), con la consiguiente caída de los contratos de fletes.
BIMCO recomienda no hacer transacciones con socios no securitizados para evitar infección de virus y malware.
El Sr. Sorensen mencionó un caso típico y muy frecuente, de un técnico de radar que embarca para reparar un problema en el radar. Enchufa su laptop y allí ya está ingresado a todo el sistema del buque.
Finalmente, BIMCO ha emitido su nuevo grupo de “Guidelines” (guías) para salvaguardar la seguridad cibernética de la actividad naviera.
Estas guias son las que siguen:
- Identificar los cyber riesgos
- Tomar las medidas para evitar que esos riesgos se transformen en eventos
- Detectar los eventos de cyber seguridad lo más rápido posible
- Tener planes para responder de inmediato y re-iniciar los sistemas afectados
- Tener preparadas las medidas para restaurar todos los sistemas impactados
Mencionó que el tema de las amenazas a la ciberseguridad será la más probable causa de demora en la entrada en vigor de los buques totalmente sin tripulación.
6.10– EL TALON DE AQUILES DE LOS BUQUES AUTÓNOMOS.
La firma Inmarsat menciona en un artículo publicado en la página Web de Gcaptain que hoy en día unos 30.000 buques en el mundo tienen alguna clase de acceso permanente a Internet por vía satelital. Además destacan que en forma creciente los buques están siendo dotados de aparatos electrónicos muy sofisticados, tales como sistemas de navegación, de control de maquinarias, etc. que hacen que ya no se pueda considerar a los buques en alta mar como “aislados” ni “protegidos” de cyber ataques por el solo hecho de estar allí.
Menciona que aún en el caso de que a bordo exista una segregación de sistemas aislados para uso de (i) tripulantes, (ii) para navegación, y (iii) para ordenar compras y servicios a los proveedores, esta “compartimentación” es vulnerable a la acción de los tripulantes que rápidamente encuentran la forma de puentearlos, no necesariamente con fines maliciosos, sino sencillamente en su afán de ganar tiempo ante una emergencia.
Para complicar más las cosas, las líneas que hacen transporte de contenedores mantienen un nivel de interacción cibernética con sus clientes, puertos, autoridades, las oficinas de la compañía naviera, etc. que hacen que sus operaciones no puedan hoy en día hacerse en forma manual en caso de caída de sus sistemas por hakeo o por accidente, con lo cual se han transformado en particularmente vulnerables (caso Maersk).
Esto se complica aún más pues muchas empresas marítimas toman buques de terceros en fletamento por períodos cortos, estos buques están con una herencia analógica que hace que para “digitalizarlos” se toman atajos con consideraciones mínimas sobre la cyber seguridad.
Según Inmarsat, es difícil calcular las potenciales consecuencias de un acceso a la información de las compañías por un predador determinado a causar daño.
La compañía está desarrollando soluciones de software especial para asistir a sus clientes y planifica introducir un sistema UTM (Unified Threat Management) o servicio unificado para clientes para proteger sus sistemas de IT mediante la aplicación de las Guías de BIMCO, además de estar trabajando con IACS (International Association of Classification Societies) para formular un pack de recomendaciones enfocadas en la cyber seguridad. Inmarsat – (Gcaptain)
6.11- NUEVO CÓDIGCO EN REINO UNIDO REQUIERE MAYOR SEGURIDAD CONTRA CYBER ATAQUES.
El Reino Unido ha emitido un nuevo código de buenas prácticas de cyber seguridad para ayudar a los armadores y operadores a mejorar la seguridad.
El Sr. Callanan del Dto de Transporte del reino dijo que los armadores deben tomar conciencia que el incremento en la actividad de los buques autónomos los hará vulnerables a esta clase de ataques.
La firma Futurenautics llevó a cabo una encuesta que ha arrojado resultados alarmantes:
- 44 % de los encuestados consideran que su sistema de IT (tecnología de la información) es incapaz de protegerlos de los ataques.
- 39 % había sufrido ataques en los últimos 12 meses.
- 61 % no quiso hacer comentarios, por lo cual se cree que el porcentaje de ataques puede ser mucho mayor.
El Sr. Peter Broadhurst de Inmarsat dijo que el problema no es sólo de infraestructura insuficiente, pero también de falta de entrenamiento de las tripulaciones. Dio como ejemplo el caso típico de un tripulante que embarca con un archivo que trae de tierra, infectado con Malware, que ni bien accede por wifi del buque infecta a todos los sistemas del buque.
El 39 % de los armadores encuestados manifestó su preocupación sobre la falta de alerta y falta de entrenamiento en cyber seguridad de sus tripulaciones.
El Sr Broadhurst mencionó que los armadores tienen que tomar conciencia no sólo de los riesgos de sufrir un ataque, sino que los sistemas de IT no son un opcional, sino una parte crítica de la infraestructura del buque.
Finalmente, con las nuevas reglas que entrarán en vigencia a partir de 2021 un buque que no presenta nivel de seguridad cibernética puede terminar impedido de zarpar, como si tuviera una falla en máquinas, en timón o en casco (unseaworthy) Sept. 2017 – The Loadstar
6.12– VUELTA A SISTEMAS DE RADIO, LORAN PARA PROTEGERSE DE CAÍDAS DE SISTEMAS GPS.
Cerca del 90 % del intercambio comercial del mundo es transportado por mar en rutas que están siendo transitadas por toda clase de buques. Los sistemas de posicionamiento GPS dependen de la recepción de señales de satélites que los expertos sostienen son vulnerables a ataques de piratas o hackers.
Corea del Sur está desarrollando un sistema de posicionamiento basado en tierra que es el eLoran, mientras que los Estados Unidos, Gran Bretaña y Rusia están pensando lo mismo.
Este movimiento hacia sistemas no dependientes de los satélites se origina en una cantidad de ataques y disrupciones a los sistemas de posicionamiento en años y meses recientes, sin que se pueda asegurar que todas las disrupciones se originaran en un ataque deliberado, ya que las tormentas solares también los afectan.
Durante 2016 Corea del Sur informó que cientos de sus buques pesqueros habían debido regresar a puerto antes de completar sus faenas debido a una caída masiva y prolongada de las señales de GPS. Acusaron a Corea del Norte que rechazó tener responsabilidad alguna en el hecho.
En Junio de 2017 el US Coast Guard fue avisada de que un buque sufría de una disrupción en su GPS al igual que otros 20 buques en la misma zona.
El ataque a Maersk en Junio de 2017 no afectó sus sistemas de navegación, pero destruyó la operatividad de la flota durante varios días.
El ingeniero Brad Parkinson, el “padre del GPS” y su principal desarrollador dijo que apoya el establecimiento de eLoran como un sistema de back up para el GPS.
Dijo que, si bien serán necesarios varios trabajos y muchos fondos para llevar la red a lo que fue antes de la introducción del GPS, el eLoran es bi-direccional, ofrece una señal muy fuerte en una frecuencia totalmente distinta a la del GPS y será un disuasivo a ataques al sistema GPS.
eLoran
Los especialistas afirman que el problema con las señales del sistema GPS es que son emitidas a 12.500 millas sobre la superficie de la tierra, que llegan con una señal muy débil, y que puede ser interferida con aparatos de bajo costo y muy accesibles.
En cambio, el eloran que es un derivado del sistema Loran que fue creado durante la 2da. Guerra Mundial, es muy difícil de bloquear o alterar pues tiene una potencia 1.3 millones de veces más potente que la del GPS. Para bloquear semejante señal haría falta un transmisor tan potente que su uso delataría su posición y que inmediatamente sería destruido.
Mencionan además que, al desaparecer las habilidades y talentos para manejar cartas de papel, los marinos mercantes se han recostado más y mas sobre las cartas electrónicas y el posicionamiento por GPS.
El gobierno de Corea del Sur está trabajando para tener en funcionamiento tres estaciones de eLoran en sus costas para 2019.
Por el contrario, en Europa los gobiernos de Francia, Dinamarca, Noruega, y Alemania todos han tomado la decisión de cerrar o desmantelar sus viejas instalaciones de radio.
ThomsonReuters – Agosto 2017
- – BUQUES SIN TRIPULACION – Conclusiones y desafíos.
7.1 – TRANSICIONES

El buque Bienvenue, 1883
La transición de la vela al vapor duró varias décadas, durante las cuales se vieron buques navegando a vela y a vapor, y también combinados de vela y propulsión a vapor como el de la foto.
En el futuro inmediato seremos testigos de otra transición, la de los buques hoy convencionales navegando junto a los buques “inteligentes” controlados remotamente o totalmente autónomos.
7.2 -MENTALIDAD DIGITAL – Doctor en Ingeniería Javier Zamora, Universidad de Navarra (Diario Perfil 16 sep. 2017)
El académico Javier Zamora dijo durante su visita a nuestro país que ya no es importante que los directivos sepan qué tecnologías elegir para cada momento, sino que comiencen a pensar de otra manera, para entender cómo las tecnologías cambian los modelos de negocios. Hay que entender realmente el cambio -que tarde o temprano llegará a todos los rubros productivos – y para ello hay que contestar tres preguntas:
- ¿Porqué está ocurriendo a un ritmo tan acelerado?
- ¿Qué está cambiando y qué nuevos modelos de negocios podemos intentar?
- ¿Cómo realizar el cambio en cada empresa?
El mensaje para los directivos es que necesitan hacer un cambio cultural, necesitan reinventarse, con un formato abierto, para que cualquier producto tradicional pueda ser reinventado, amparados en el momento distruptivo que atraviesa la sociedad.
Estos conceptos se adecuan perfectamente para la llegada de los buques inteligentes.
7.3 – LOS DESAFÍOS PARA LOS SALVAMENTISTAS MARÍTIMOS

Smit Salvage recuperó el buque Modern Express pocas millas antes de que un temporal en 2016 lo llevara a varar en las costas francesas del Golfo de Vizcaya. Justo a tiempo.
Lo interesante de este evento fue que no había tripulación alguna a bordo, pues habían sido evacuados ante la casi certeza de que el buque daría vuelta de campana.
Para un team de salvamentistas no será novedad llegar hasta un buque helitransportados, pero lo que hará más complicada la tarea en caso de ser un buque autónomo o controlado a distancia será que no contarán a bordo con agua, ni comida, ni elementos de primeros auxilios, ni lugar para dormir e higienizarse durante su estadía a bordo. Estas operaciones de salvamento pueden durar desde pocos días hasta varias semanas.
7.4 – SOBRE LOS ALGORITMOS MEDIANTE LOS CUALES UN BUQUE AUTÓNOMO TOMARÁ LAS DECISIONES sobre cómo y por donde esquivar a otros buques u obstáculos
El monitoreo de si los otros buques navegan correctamente en base a sus situaciones es fundamental para determinar lo más temprano posible si hay en las cercanías o en aproximación uno o más buques que no responden a esa normalidad, con el fin de tomar decisiones de cuál es la mejor forma de evitar situaciones de aproximación con riesgo de colisión.
Esto será fundamental para lograr calidad en la navegación de buques autónomos.
7.5 – SOBRE LAS NUEVAS PROFESIONES
Se llegará a una nueva profesión de Expertos en Buques o Shipping Autónomo.
7.6 – SOBRE LAS LIMITACIONES QUE UN ESTADO RIBEREÑO PUEDE IMPONER a buques que llegan a sus aguas
Sostiene el CMI que esta norma puede llegar a constituir una limitación significativa en la libertad de movimiento y navegación de buques sin tripulación.
Menciona también que esta potencial limitación no es exclusiva de los buques no tripulados.
7.7 – SOBRE EL SOLAS, Y EL EMBARCO DE PRÁCTICOS
Se menciona también en esta parte del SOLAS que los buques deben tener los mecanismos para facilitar el embarco de prácticos. Se menciona que eventualmente se podrá llegar a una transferencia del buque en forma remota, del operador a distancia hacia el práctico, también a distancia, para que – sin que físicamente embarque nadie – el buque sea conducido a muelle por el práctico también en forma remota.
7.8 – SOBRE LA ADAPTABILIDAD DE LA LEX MARITIMA a los cambios tecnológicos y políticos
Van Hooydonk parte de la base de que varias de las instituciones del derecho marítimo se remontan a cientos de años atrás.
Las figuras del capitán, el práctico, el contrato de fletamento, el conocimiento de embarque, las responsabilidades por daños por colisiones, el salvamento marino, la avería gruesa, la limitación de la responsabilidad, los seguros marítimos, el embargo e interdicción de salida de buques, etc. todas ellas se derivan de normas nacionales y locales y algunos documentos de épocas pre napoleónicas, o aún de la Edad Media.
Algunas de estas instituciones se originan en la Antigüedad y sin embargo subsisten hasta hoy en día bajo sus versiones adaptadas a los cambios.
7.9 – SOBRE LAS AMENAZAS A LA CYBER SEGURIDAD
El Sr. Sorensen de BIMCO Mencionó que el tema de las amenazas a la ciberseguridad será la más probable causa de demora en la entrada en vigor de los buques totalmente sin tripulación.
7.10 – CUÁL ES LA FUERZA QUE IMPULSA LA AGENDA DE DESARROLLO DIGITAL? (Lloyds List)
Richard Meade, el Managing Director de Lloyds List dijo en una mesa redonda en la conferencia sobre disrupción digital llevada a cabo en Oslo durante Mayo de 2017, que el shipping no es una industria a la que le gusta ser el primero en adoptar nuevas ideas o conceptos.
Se preguntaba cuál sería la razón por la cual una corporación naviera tomaría la decisión de invertir enormes cantidades de capital en nueva tecnología o en cambiar lo que ellos vienen haciendo en su segmento del negocio si los competidores no harán lo mismo, y sin saber cuál será la reacción de los clientes. ¿Estarán esos clientes dispuestos a correr el riesgo de ser los primeros en adoptar un cambio?
Otros participantes de la mesa redonda mencionaron que ven empresas que acometen el tema con pasos decisivos hacia las nuevas técnicas mientras que otros prefieren esperar y observar.
7. 11 – LA CUARTA REVOLUCIÓN INDUSTRIAL
La primera Revolución Industrial abarcó los siglos XVIII y IXX y se caracterizaron por la utilización del vapor para la producción y la movilización de personas y mercaderías.
La segunda revolución industrial duró desde 1870 hasta 1914 y se caracterizó por la producción en masa de la electricidad. La tercera revolución industrial comenzó en 1980 con la conversión de los mecanismos análogos en digitales.
La cuarta revolución industrial también se conoce como la revolución digital, que incluye la robótica, la inteligencia artificial, la nanotecnología, la biotecnología, la cuántica, el internet de las cosas, las impresiones 3D y los vehículos autónomos. Es sobre estos últimos vehículos (los marítimos) que esta investigación sobre el futuro del Shipping se ha concentrado.
(LIC. GUSTAVO R. NORDENSTÅHL) Versión Julio de 2021 #NUESTROMAR
.